projects
A collection of research projects and competition awards. / 科研项目与竞赛获奖集锦。
research

Dual-Vision Infinite-Roll Hand for Edge-Native Grasping
双视觉无限翻转灵巧手边缘端抓取
2025.10 – Present
Hardware-software co-design of an 11-DOF dexterous hand featuring dual-camera relay perception, an infinite-roll slip-ring wrist, and a reparameterized zero-shot detector achieving 16.3 FPS on an edge NPU.
11 自由度灵巧手的硬件-软件协同设计:通过腹背双目接力感知与滑环无限翻转腕消除前后感知盲区与关节死锁,并以离线重参数化零样本检测器实现边缘端 16.3 FPS 语言引导抓取。
Show project details, gallery (3), videos (2) ▼
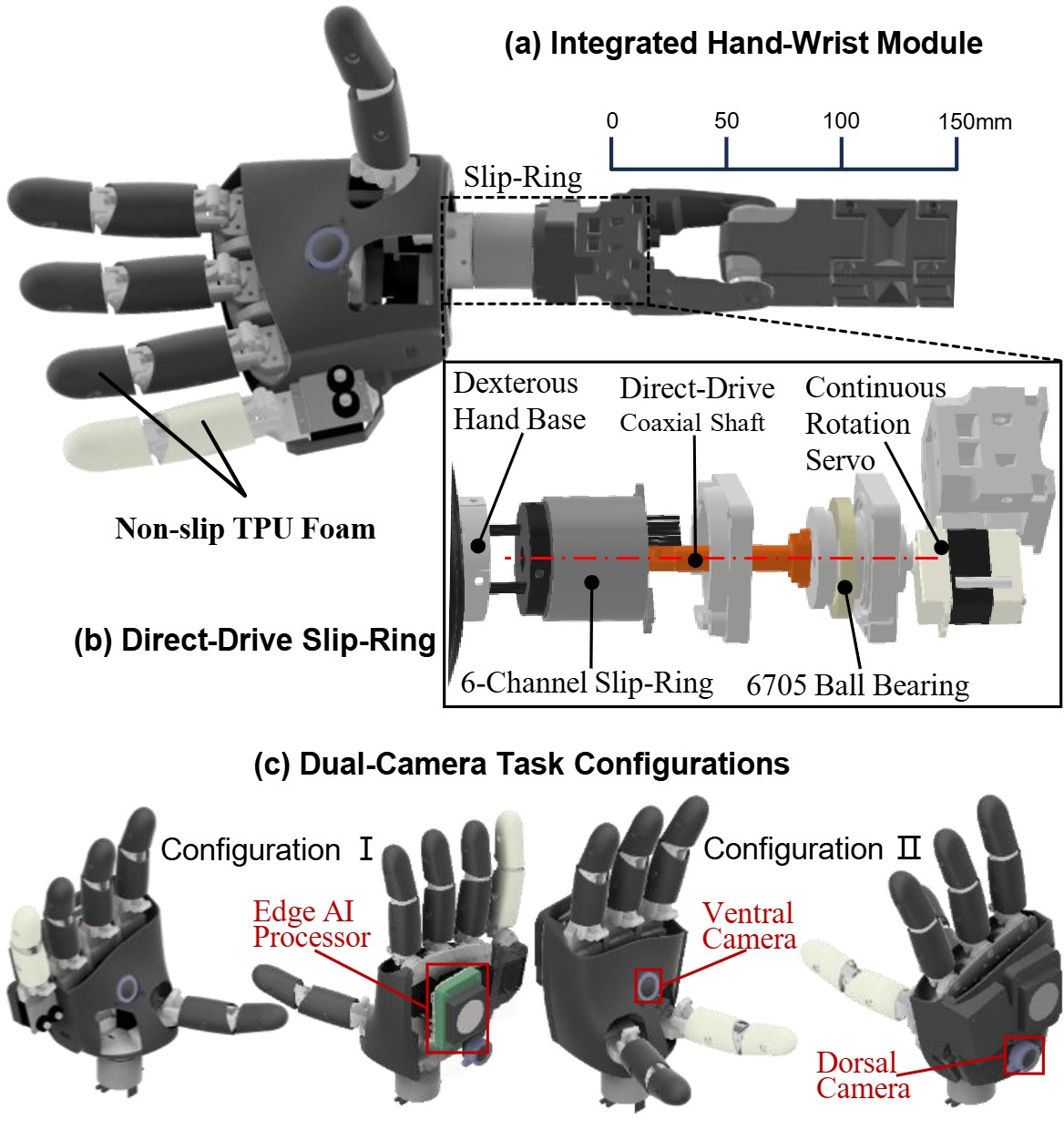
Conducted at the Vision4Robotics (V4R) Lab, Tongji University (2025 – Present), under the supervision of Associate Professor Changhong Fu. In this work, we address two intrinsic physical bottlenecks in front-rear dexterous grasping: a perceptual blind spot caused by a single palm-mounted camera, and a kinematic deadlock caused by bounded wrist rotation. Rather than compensating in software, we resolve both through electromechanical co-design.
On the hardware side, a dorsal camera is integrated alongside the ventral camera on the hand chassis, and a direct-drive conductive slip-ring replaces the conventional bounded J1 wrist joint. Both cameras and the edge processor co-rotate with the hand, eliminating the need for high-bandwidth video transmission across the rotary joint. The slip-ring carries only six low-bandwidth channels (power rails and a shared serial bus), which was made possible by choosing a serial bus-servo architecture for the finger actuators.
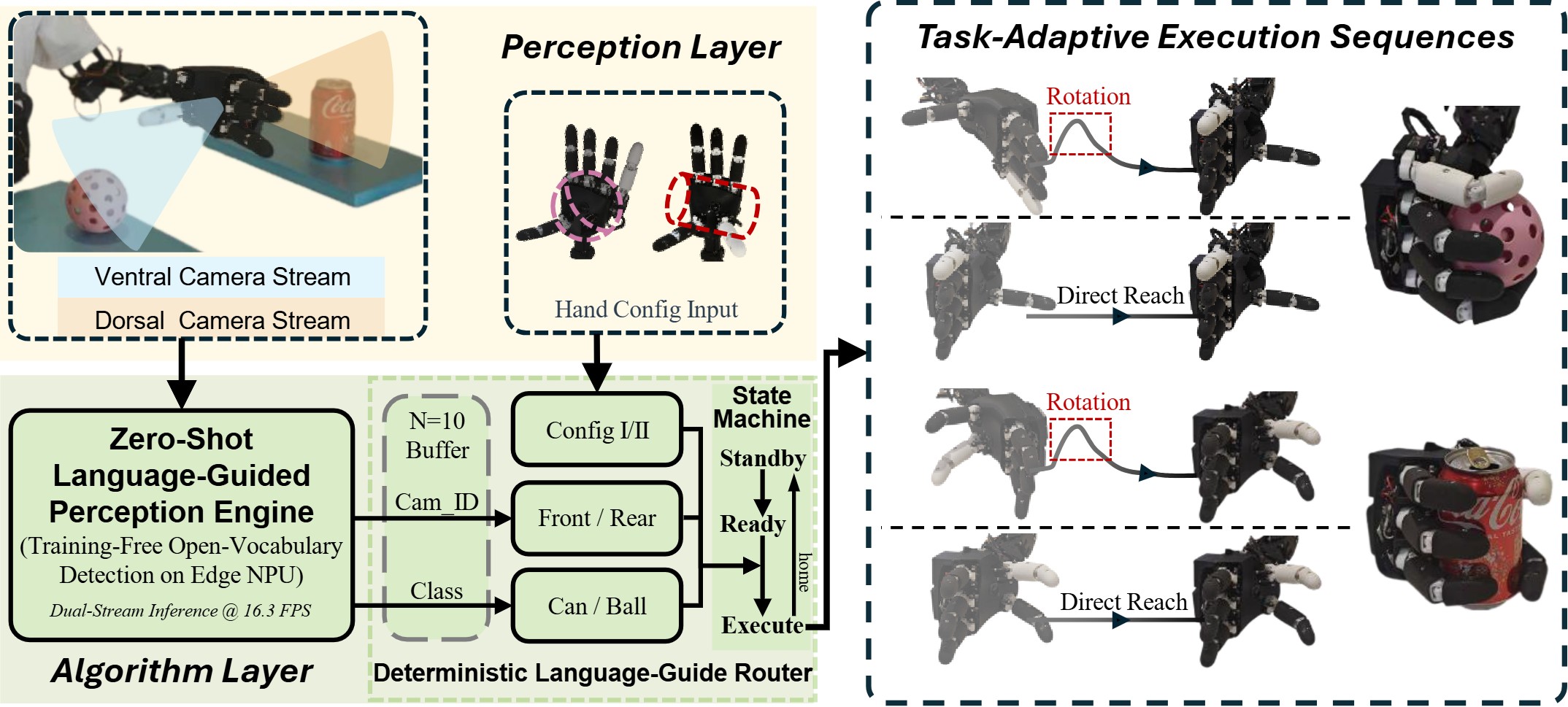
On the software side, a reparameterized zero-shot detector (YOLO-World backbone with offline CLIP text injection into the VL-PAN neck) runs on a Rockchip RK3588 NPU, allowing the network to operate as a vision-only model during online inference, thereby eliminating the computational overhead of text encoding. SiLU activations are replaced with ReLU for NPU compatibility, and the model is INT8-quantized with a 1.5 pp mAP cost in exchange for a 2.4× throughput gain, achieving 16.3 FPS end-to-end.
A deterministic state machine with an N=10 consensus buffer (~613 ms stabilization window) fuses semantic class and camera-source labels into “Where” and “What” routing decisions, triggering pre-calibrated grasping primitives for either forward or 180° flip-over paths. Proof-of-concept experiments over 40 physical trials (two objects × two paths) yielded a 75% aggregate end-to-end success rate without any task-specific fine-tuning.
本项目于同济大学 Vision4Robotics (V4R) 实验室开展(2025 – 至今),指导教师为符长虹副教授。本工作针对灵巧手前后方向抓取中的两个物理瓶颈——单腹侧摄像头引发的感知盲区,以及有界腕关节导致的运动学死锁——通过机电协同设计从硬件根源加以解决,而非依赖软件层面的补偿。
硬件方面,在手掌底座上集成了腹侧(正面)与背侧(后视)双摄像头,形成前后互补的完整感知球;J1 腕关节引入直驱导电滑环,将关节行程从有界域扩展至无界连续旋转,物理消除翻转 180° 时的运动学死锁。两路摄像头与边缘处理器均随手部同步旋转,无需跨旋转接头传输高带宽视频信号——滑环仅需承载电源与串行总线共六路低带宽信号,这得益于手指驱动器统一采用串行总线伺服架构的早期设计决策。
软件方面,采用”训练多模态、推理单模态”范式:离线将冻结的 CLIP 文本编码器生成的语义嵌入通过结构重参数化注入 VL-PAN 颈部,使网络在线推理时作为纯视觉模型运行,彻底消除文本编码器的在线计算负担。在瑞芯微 RK3588 NPU 上进一步将 SiLU 激活替换为 ReLU,并进行 INT8 量化,以 1.5 个百分点的 mAP 损耗换取 2.4× 吞吐量提升,最终实现 16.3 FPS 端到端推理。确定性状态机结合 N=10 帧共识缓冲(~613 ms 稳定窗口),将检测类别与相机来源解耦为”去哪”与”抓什么”两个决策维度,驱动预标定的抓取动作原语。40 次实物实验(两类物体 × 前后两条路径)验证了 75% 的端到端成功率,无需任何任务特化微调。
- Served as the project lead, proposed the core innovation, built and tested the full system, and led the paper writing and submission
- Designed a dorsal-ventral dual-camera relay topology for complementary front-rear perception, eliminating the structural perceptual blind spot of single eye-in-hand configurations
- Integrated a direct-drive conductive slip-ring into the J1 wrist joint, enabling infinite continuous roll and removing kinematic deadlock for rearward flip-over grasps
- Deployed a reparameterized zero-shot detector (YOLO-World + offline CLIP injection, SiLU→ReLU, INT8) at 16.3 FPS on an RK3588 NPU with no online text encoding
- Built a deterministic dual-path state machine with an N=10 consensus buffer, completely decoupling spatial routing (front/rear) from the grasping configuration
- Validated the system end-to-end with a 75% success rate across 40 physical trials without task-specific fine-tuning
- 作为项目主要负责人,提出核心创新点,完成全系统构建与测试,并主导论文产出与投稿
- 设计腹背双摄像头接力感知拓扑,在手部机架上同时集成正面与后视视觉,从拓扑层面消除单眼式感知盲区
- 将直驱导电滑环集成至 J1 腕关节,实现无限连续翻转,从机械层面根除翻转 180° 的运动学死锁
- 通过离线 CLIP 文本注入与结构重参数化、SiLU→ReLU 算子替换、INT8 量化,在 RK3588 NPU 上以 16.3 FPS 完成零样本语言引导检测,在线推理无需文本编码器
- 构建确定性双路状态机,以 N=10 帧共识缓冲将空间路由(前/后)与抓取构型完全解耦
- 完成 40 次实物实验,端到端成功率达 75%,无需任务特化微调

Edge-AI Snake Robot for Cross-Domain Operations
跨域作业型边缘智能蛇形机器人
2025.09 – Present
Modular snake robot with composite-metal skeleton, 6-gait locomotion, and an edge-native embodied AI stack — exhibited at the China International Industry Fair (CIIF), Shanghai.
复合材料金属骨架模块化蛇形机器人,具备六种运动姿态与边缘端具身智能,展出于中国国际工业博览会(上海)。
engineering
Precision Grasping with 2D Camera and Embedded System
二维相机与嵌入式系统限定下的机械臂精准抓取
2024.12 – 2026.01
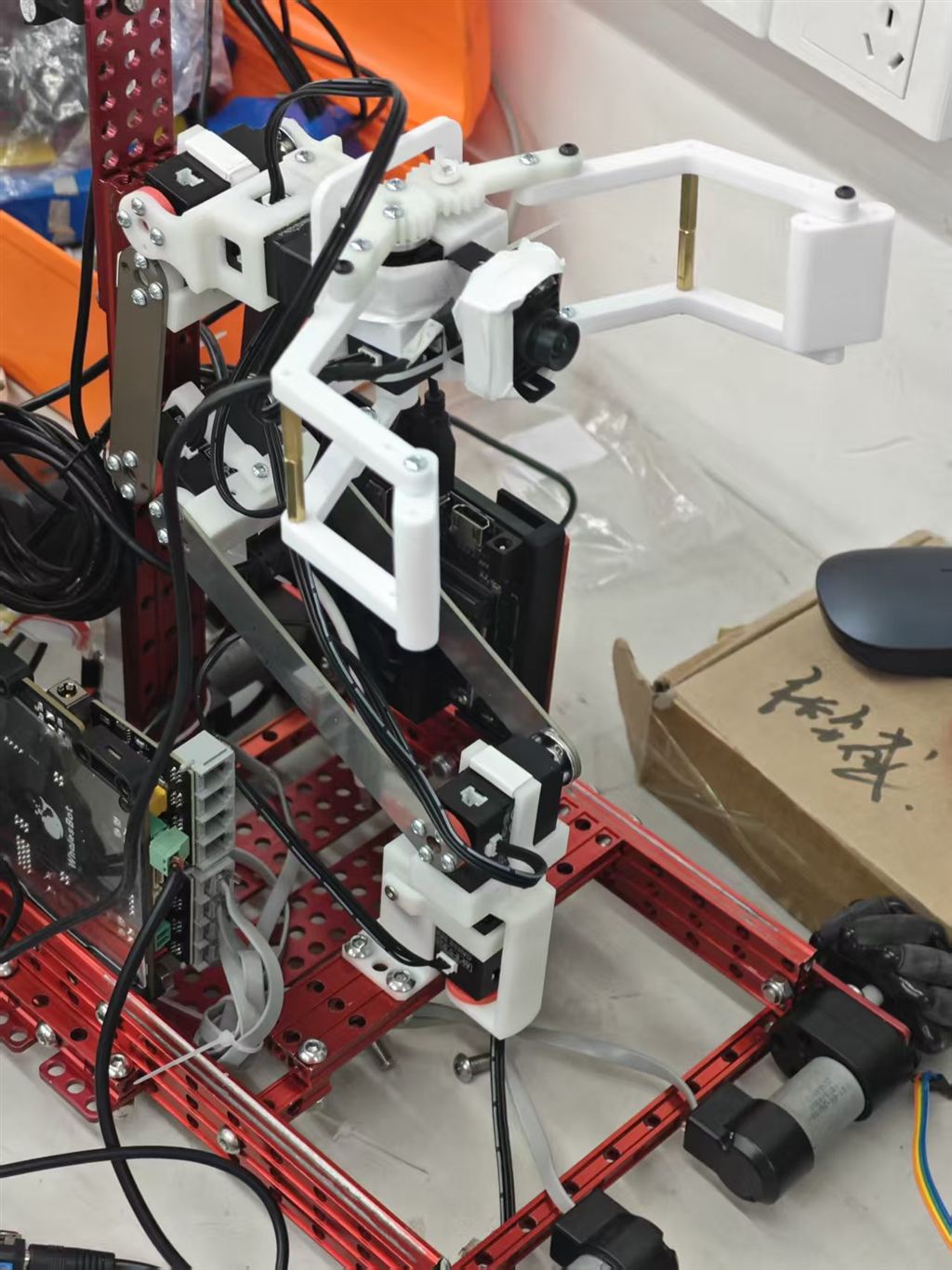
5-DOF robotic arm achieving ≥98% grasp success and ±0.5 mm positioning accuracy under strict constraints: 2D-only vision and an embedded Jetson platform.
五自由度机械臂在仅有二维平面相机与嵌入式平台的严苛限制下,实现 ≥98% 抓取成功率与 ±0.5 mm 定位精度。
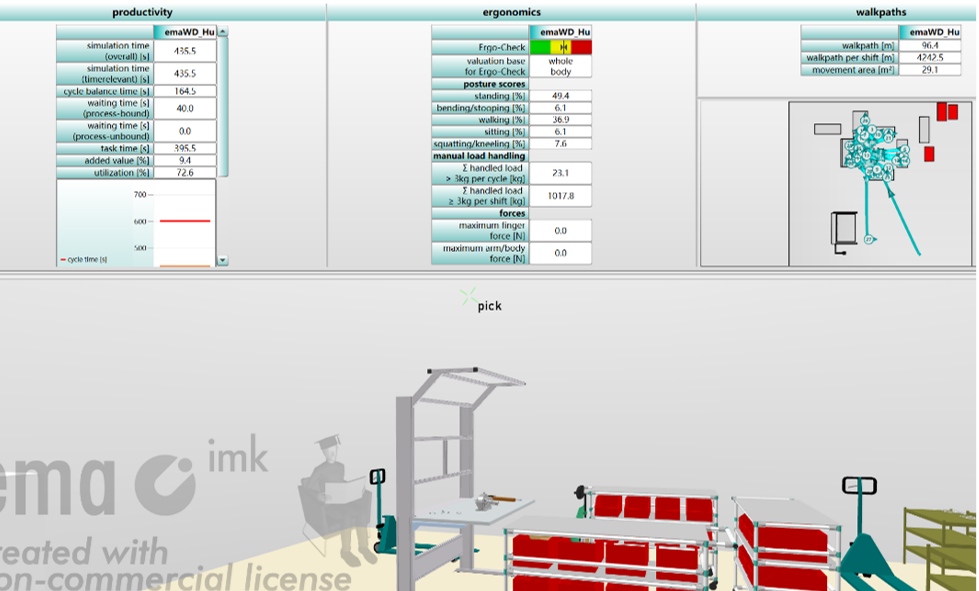
emaWD Manual Work Simulation in Smart Manufacturing
智能制造系统人工工作仿真优化
2023.11 - 2025.03
emaWD–based simulation and optimization of manual reducer assembly, covering workstation layout, ergonomics (RULA/OWAS), and cycle time.
基于 ema WD 对减速器人工装配进行仿真,从工位布局、人体姿势与节拍三方面开展分析与优化,服务智能化产线中的人工作业设计。
Below is a collection of competitions and awards. Click on any photo to view in full size.
以下是我参与的竞赛和获奖经历。点击照片可查看大图。
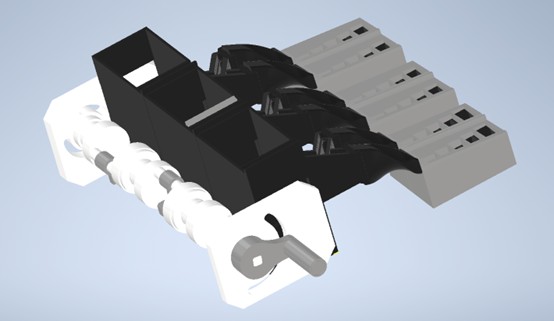
Higher Education Cup National College Student Advanced Graphics Technology and Product Information Modeling Innovation Competition - Additive Manufacturing Track - National First Prize
第十八届"高教杯"全国大学生先进成图技术与产品信息建模创新大赛【机械类增材制造赛道】国家一等奖
2025.07


Show details ▼
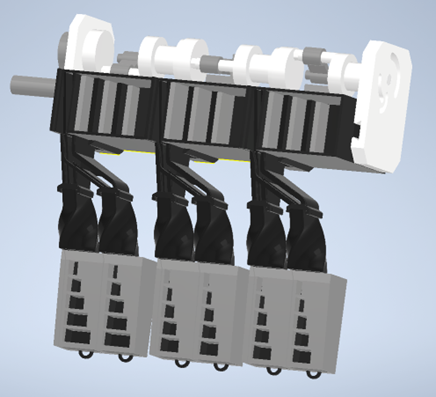
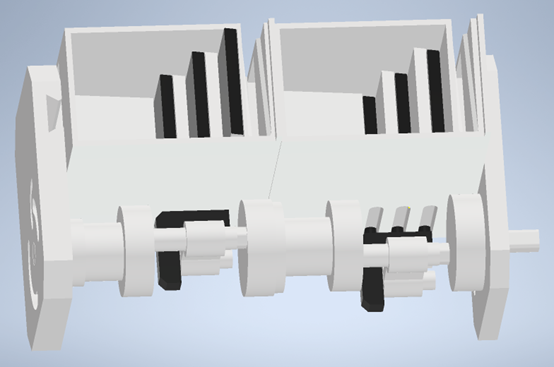
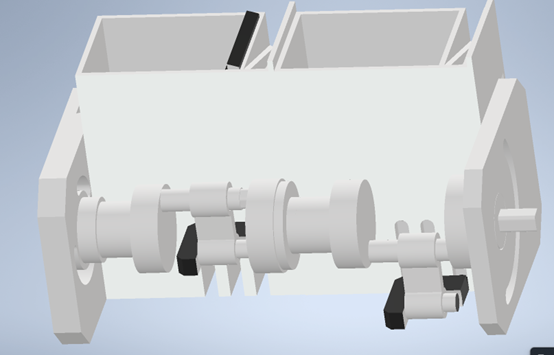
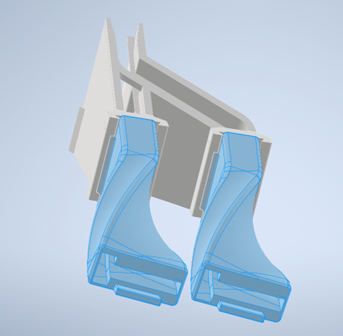
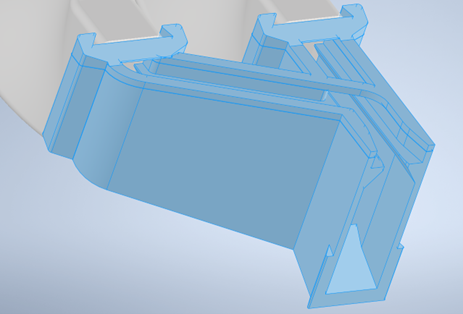
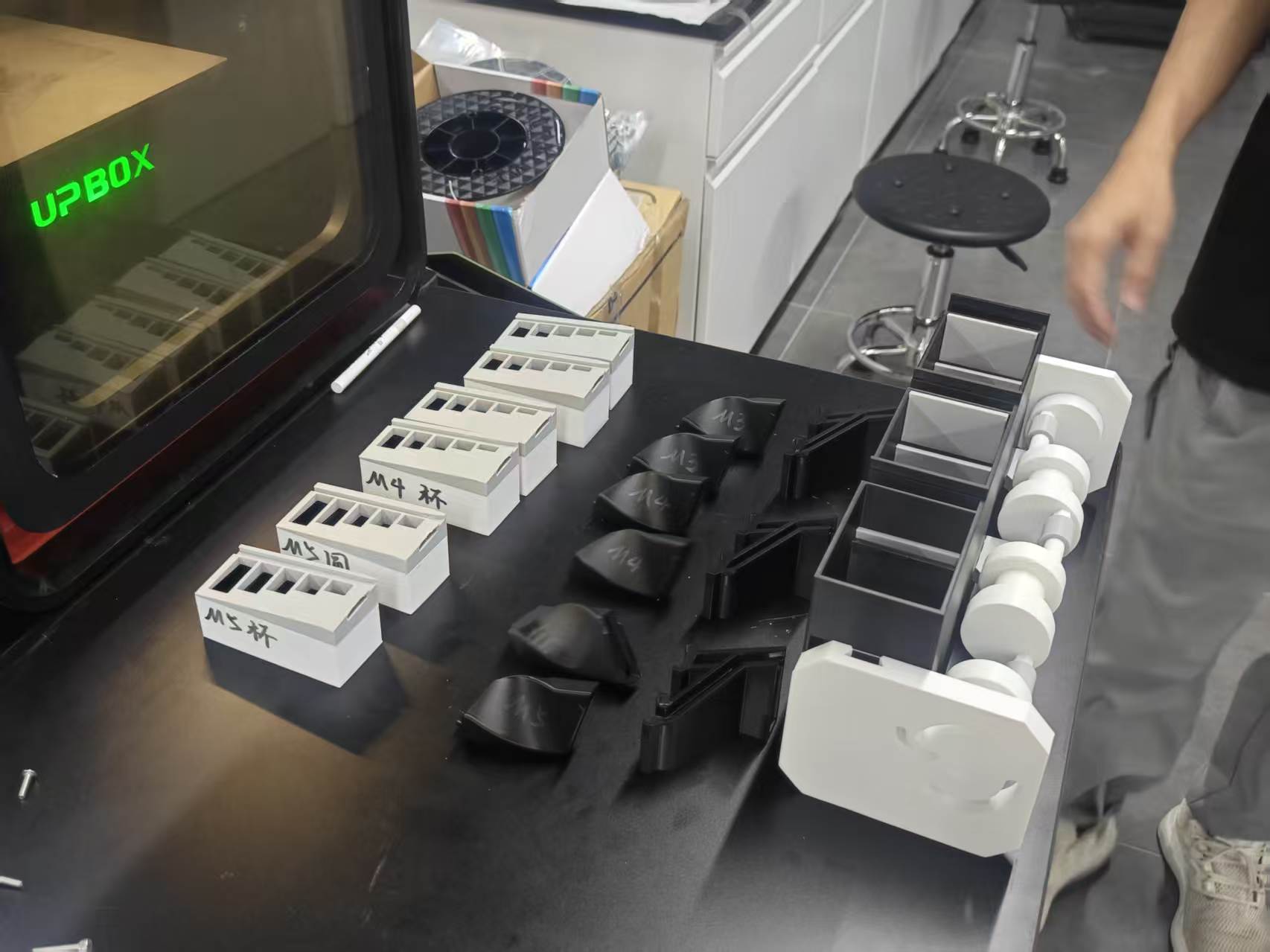
Hosted by the Professional Committee of Engineering Graphics of the China Graphics Society and co-organized by Higher Education Press, the Higher Education Cup is an A-level national discipline competition ranked among China’s top undergraduate competitions. The additive manufacturing track is a mechanical-engineering sub-track for two-person teams and evaluates the full 3D-printing workflow. The 18th competition attracted about 480,000 students from 1,147 universities at the campus level, with more than 15,500 advancing to the national final. For the assigned task of an unpowered automatic screw sorter, I served as the project lead and designed a hand-crank modular sorting device composed of three interchangeable mechanisms for screw diameter, head type, and length classification. The product was fabricated with FDM using ABS for low-cost durable structural parts and PLA for components requiring higher dimensional accuracy. I was responsible for most of the mechanism design and CAD modeling, tuning printing parameters for the printed parts, and maintaining the 3D printers. The national first prize in this track is awarded to less than 5% of participating teams and has the same recognition as main-track national awards.
大赛由中国图学学会制图技术专业委员会等主办、高等教育出版社协办,位列全国普通高校学科竞赛排行榜第21位,属国家A类赛事。增材制造赛道为机械类分赛道,2人一组,考查3D打印全流程。第十八届大赛有1147所高校约48万人参加校赛,最终15500余人晋级国赛,被誉为“图学界的奥林匹克”。本赛题为自动螺丝分拣器,要求不能使用电动机等动力源。我作为项目负责人,设计了基于手摇曲柄的模块化螺丝分拣装置,包含螺丝直径分拣、螺丝头部分拣、螺丝长度分拣三种机构,可通过模块化接口按需求自由组合。制造方面采用FDM增材制造,主体使用低成本且耐用的ABS,部分尺寸精度要求较高的结构使用PLA打印。我负责绝大多数机构的结构设计与建模、各打印件参数调整以及打印机维护。该赛道国奖与主赛道奖项同等效力,一等奖获奖比例严格控制在参赛组数5%以内,获奖难度和稀缺性较高。




Higher Education Cup National College Student Advanced Graphics Technology and Product Information Modeling Innovation Competition - Team Event - National Second Prize
第十八届"高教杯"全国大学生先进成图技术与产品信息建模创新大赛 团体国家二等奖
2025.07
Show details ▼
This entry records the national second prize in the team event of the 18th Higher Education Cup National College Student Advanced Graphics Technology and Product Information Modeling Innovation Competition. This award is separate from the additive manufacturing track listed above and reflects the team’s overall performance in the national competition main-track team event at Tongji University.
该条目记录第十八届“高教杯”全国大学生先进成图技术与产品信息建模创新大赛团体国家二等奖。该奖项与上方增材制造赛道国家一等奖为不同赛项,体现同济大学代表队在国赛团体项目中的综合表现。
BMHRI Cup Logistics Technology Creativity Contest - National Third Prize
2025年中国大学生机械工程创新创意大赛"北起院杯"物流技术创意赛 国家三等奖
2025.07 - 2025.08

Show details ▼
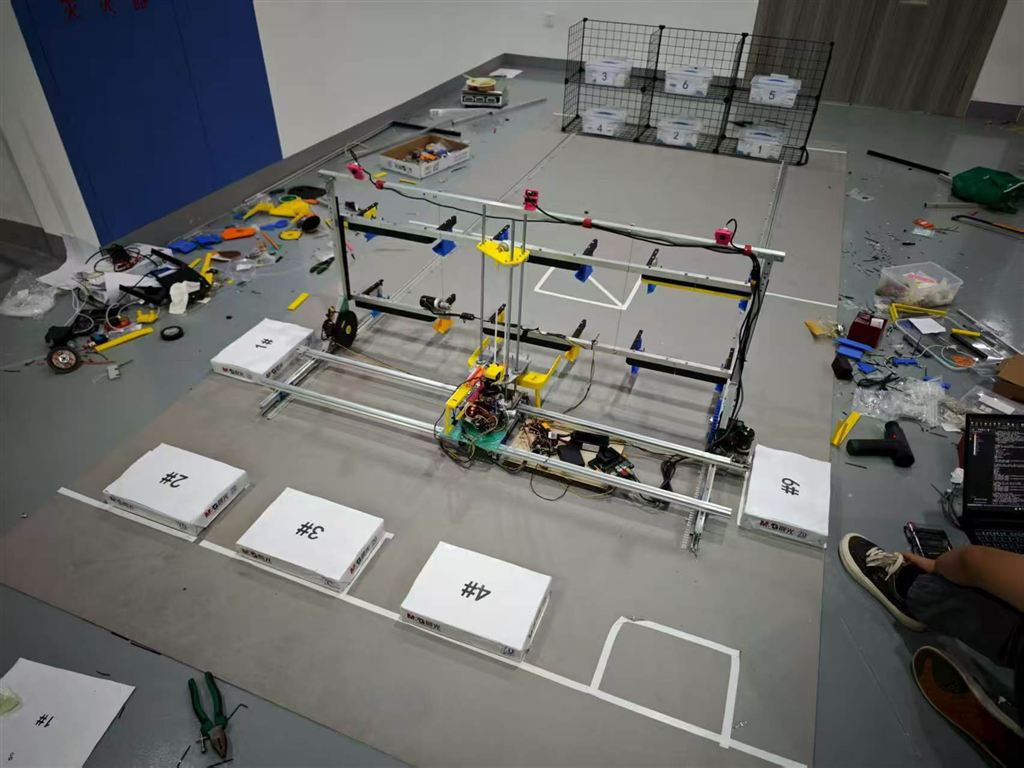
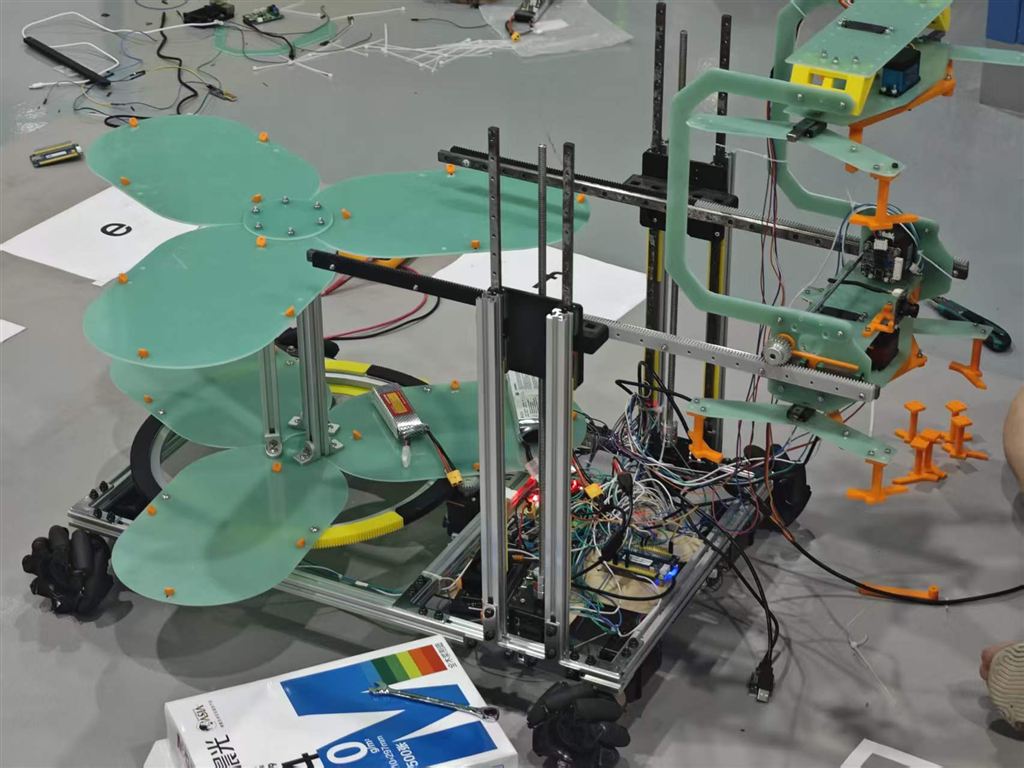
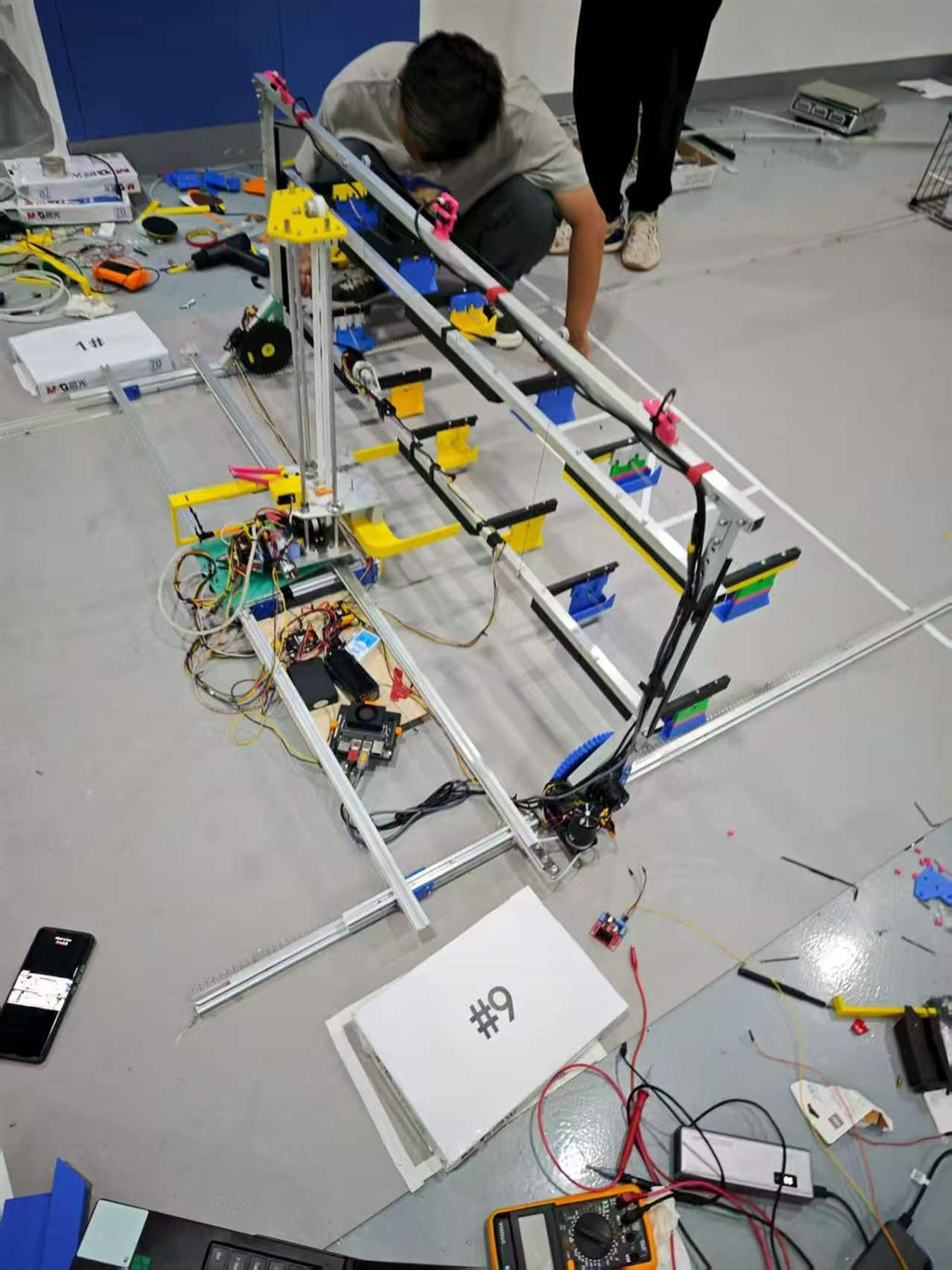
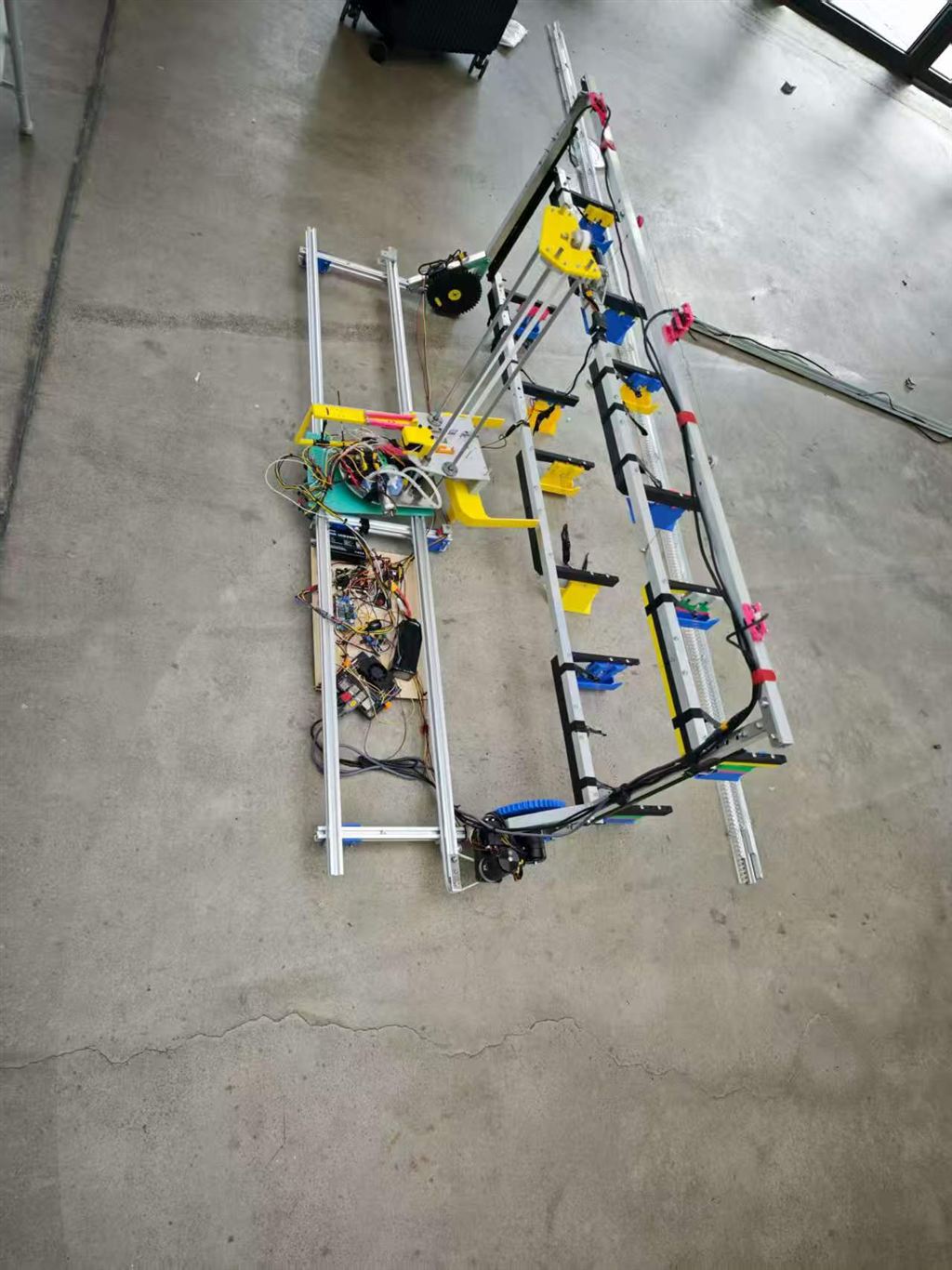
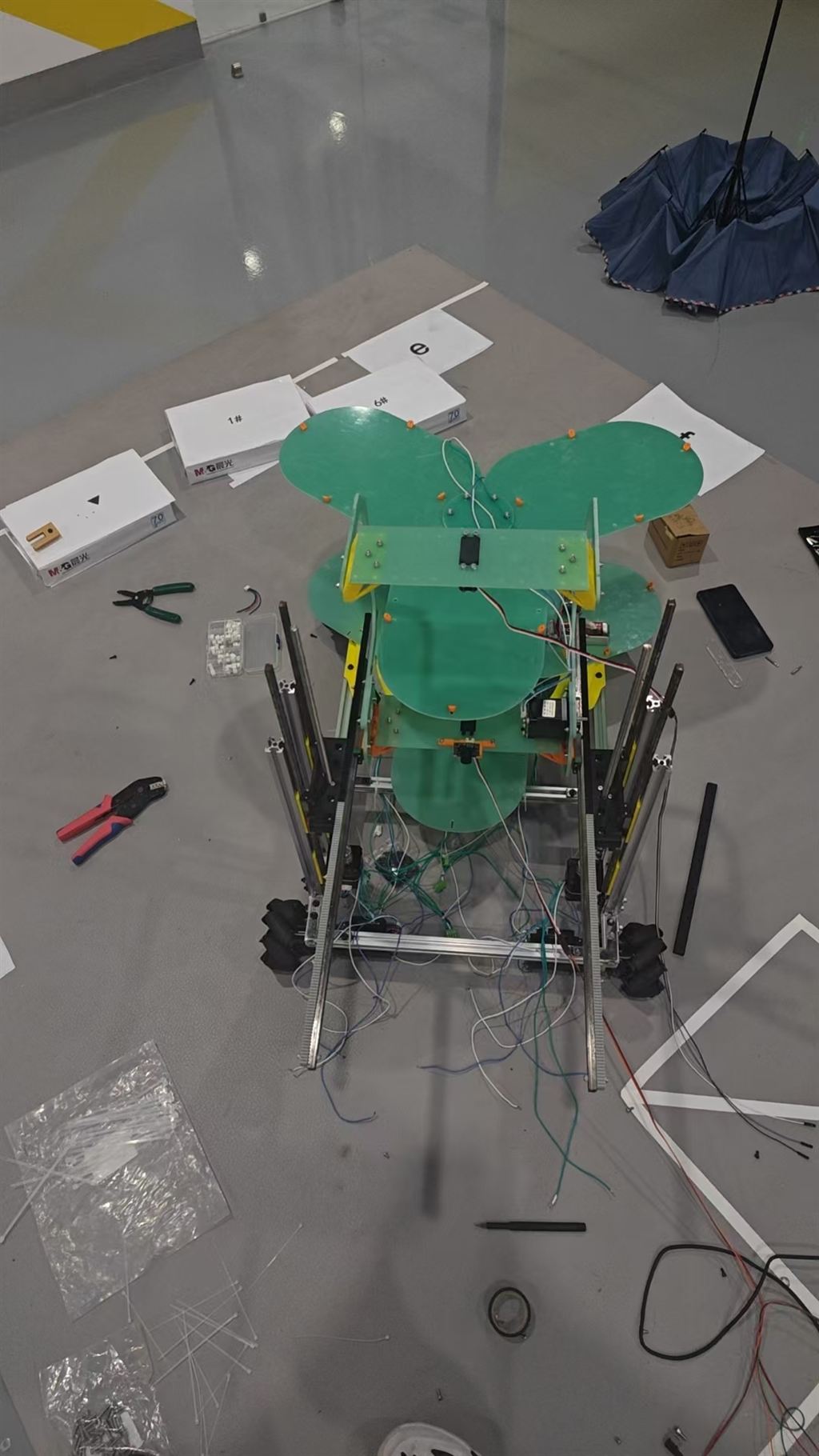
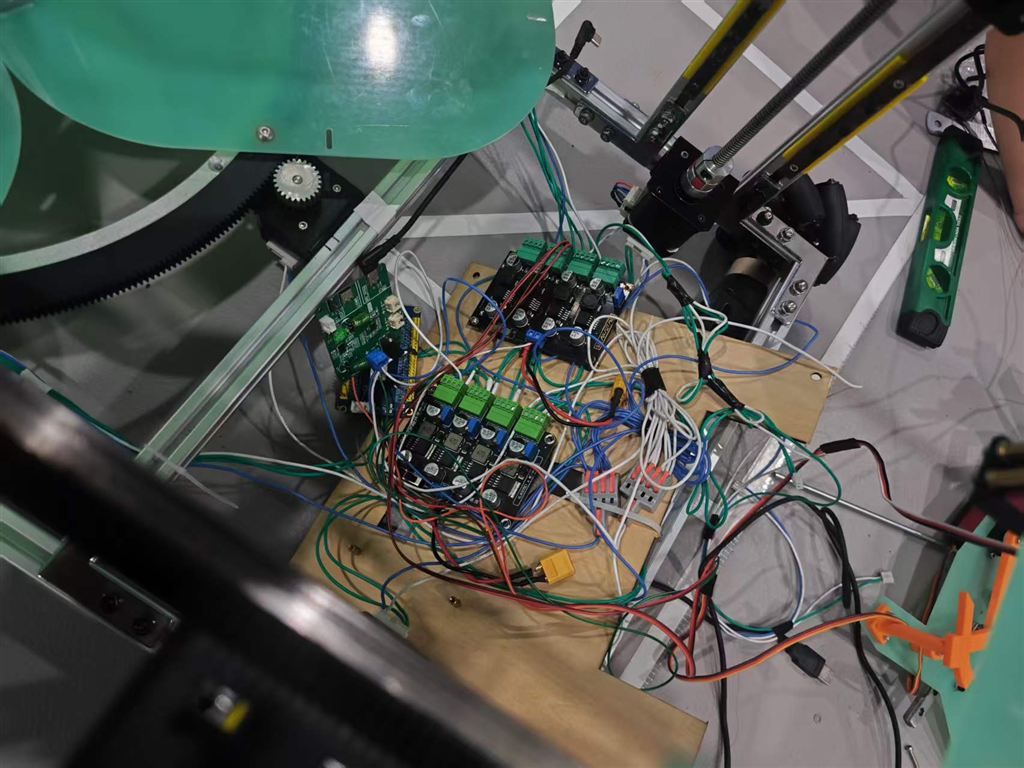
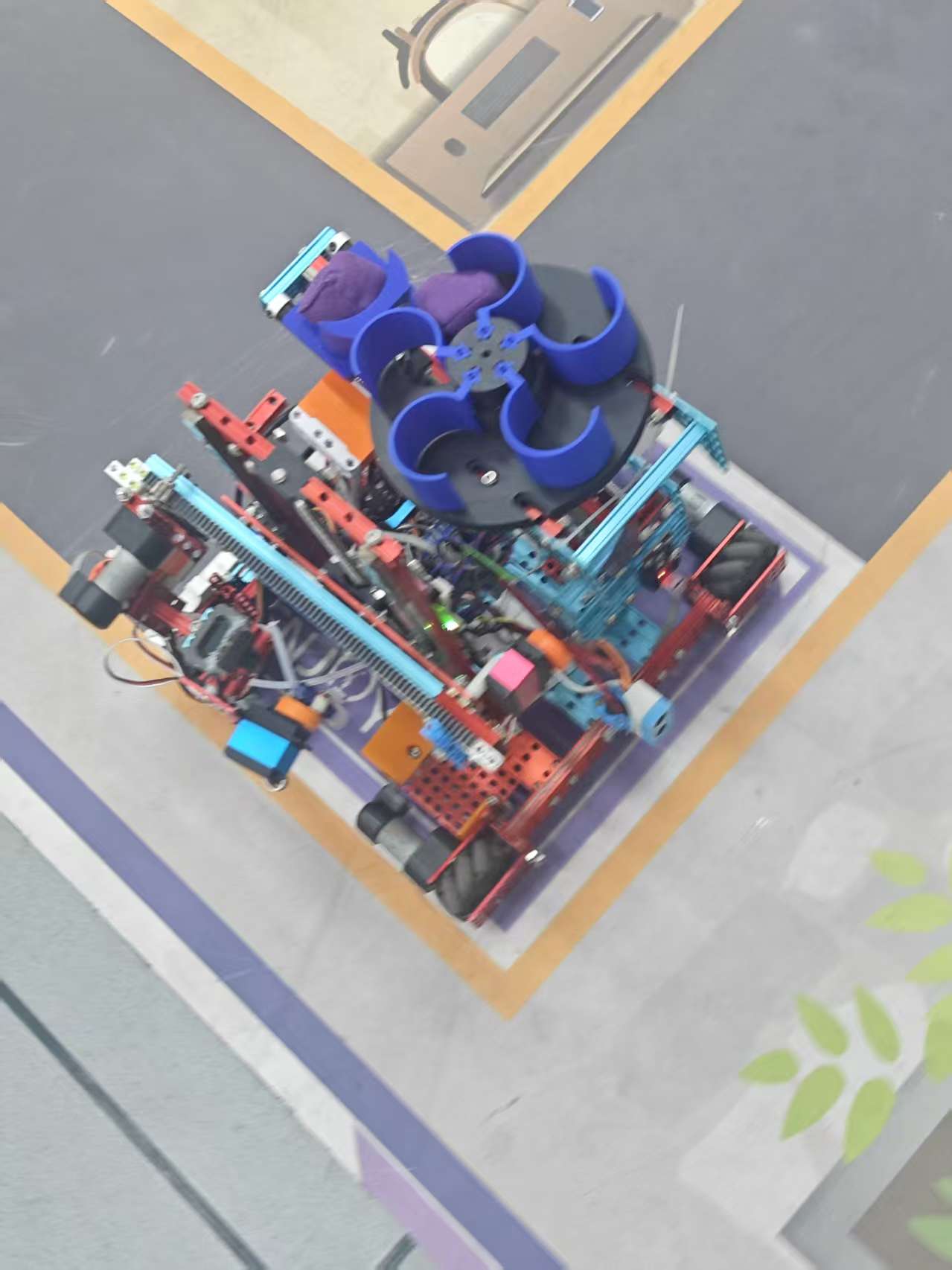
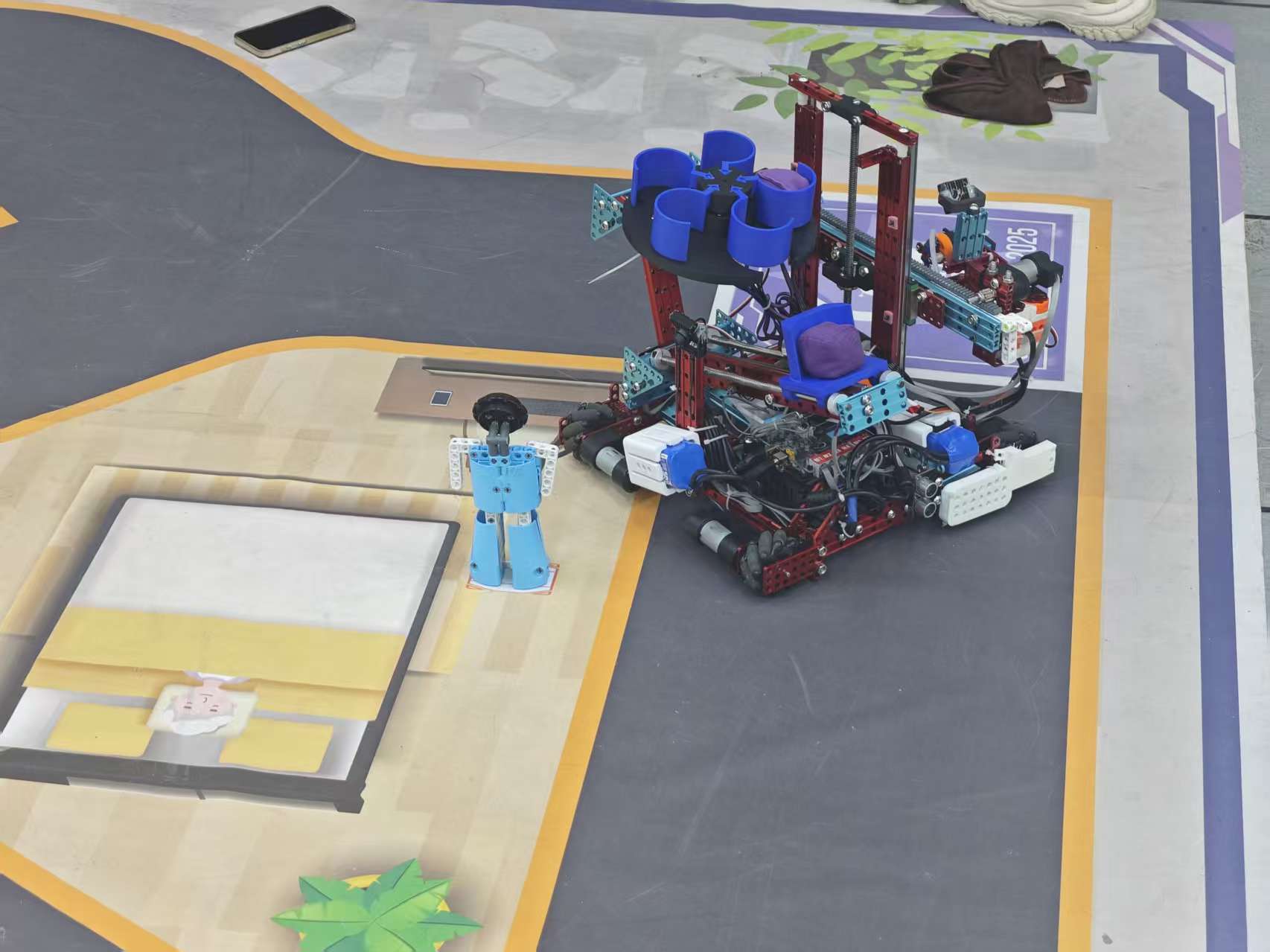
The BMHRI Cup is part of the innovation track of the China College Student Mechanical Engineering Innovation and Creativity Competition, hosted by the Chinese Mechanical Engineering Society and exclusively sponsored by Beijing Materials Handling Research Institute. It has been listed as an A-level national discipline competition since 2019. In 2025, the contest attracted 354 teams and 2,158 students from 77 universities; after regional selection, only 108 works from 46 universities advanced to the national final, where 37 national third prizes were awarded. Our task was to pick six boxes from a specified shelf and place them into target stacking positions, with evaluation based on task completion, mechanism weight, and execution time. The team designed a vision-guided robotic system using dual cameras for box and stacking-position localization, an overall translational pick-and-place mechanism, six underactuated grippers for simultaneous grasping, and a suction-based placement arm. I served as a core team member, responsible for most mechanical structure design and CAD modeling, training and deploying the vision models, and developing the full upper-computer system on Jetson Orin, with STM32 used as the lower-level controller.
“北起院杯”由中国机械工程学会主办,物流工程分会与同济大学等高校承办,北起院独家冠名,属中国大学生机械工程创新创意大赛创新赛道赛项,自2019年起连续列入全国普通高校学科竞赛排行榜,为国家A类赛事。2025年度共有77所高校、354支队伍、2158名学生参赛,经区域赛选拔后仅46所高校108件作品晋级全国总决赛,最终产生国家三等奖37项。赛题要求机器人在特定货架上夹取6箱货物并放置到规定码垛位置,综合考察任务完成度、机构重量和完成用时。团队方案在启动时调用两个方向的摄像头确定货物和码垛位置及序号,取物置物机构整体平移,取物端采用6个欠驱动夹爪并通过钢索实现整体升降,到达指定位置后同时夹取;移动至置物区后,由带吸盘执行器的机械臂根据视觉识别结果完成放置。我作为团队核心成员,负责大部分机械结构设计与建模、视觉模型训练与部署,并完成Jetson Orin上位机的全部开发;系统下位机采用STM32。



China International College Students' Internet+ Innovation and Entrepreneurship Competition (2026)
2026年中国国际大学生互联网+创新创业大赛
2026
Currently Competing / 正在竞赛中


Show details ▼
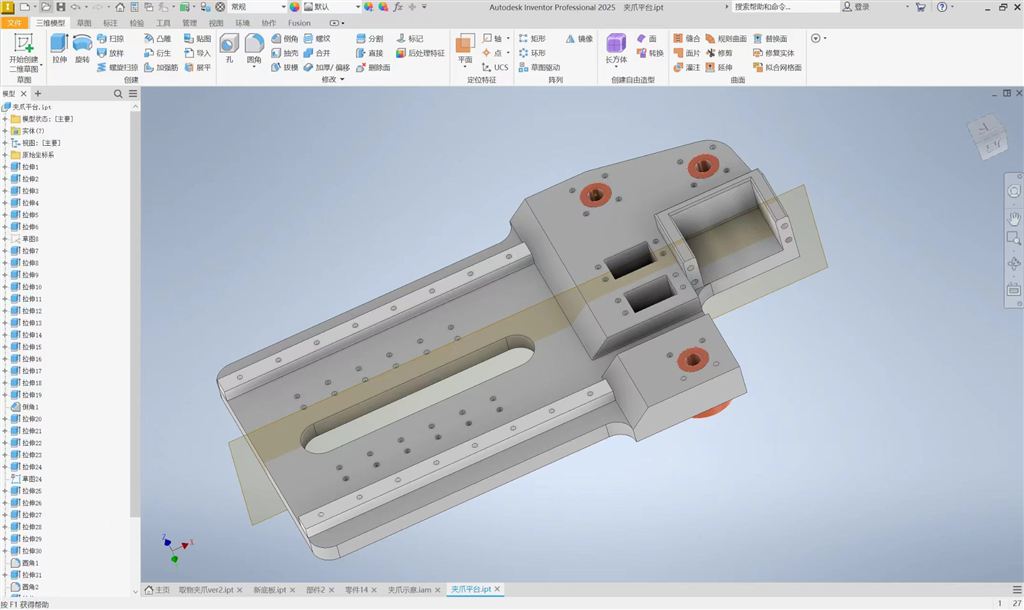
The project is currently under development for the 2026 China International College Students’ Innovation and Entrepreneurship Competition. The project direction is an intelligent human-machine collaborative agricultural machinery platform, and a company has already been established around the project. My role focuses on visual and industrial design support for the engineering prototype: I contribute to part of the mechanical structure design and complete the modeling work, including mechanical CAD modeling in Inventor and complex-surface aesthetic modeling in Fusion for components such as the vehicle logo.
项目目前处于中国国际大学生创新大赛(2026)备赛与打磨阶段,方向为“智慧有人无人农机”,目前已成立公司。我在团队中主要负责美工与工程外观相关工作,参与部分机械结构设计,并负责全部建模工作,包括使用Inventor进行机械结构建模,以及使用Fusion完成车标等复杂曲面的美学建模。

20th National University Students Intelligent Car Race - Baidu Smart Transportation Track - Regional Second Prize
第二十届全国大学生智能汽车竞赛百度智慧交通赛项 区域赛二等奖
2025.07



Show details ▼
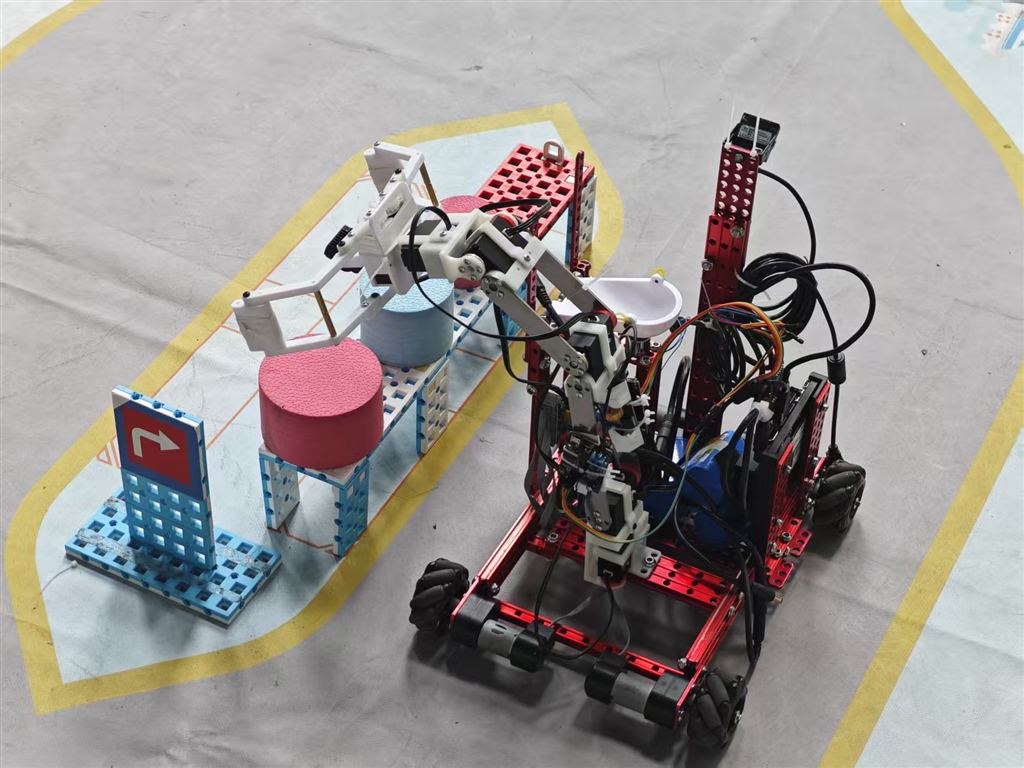
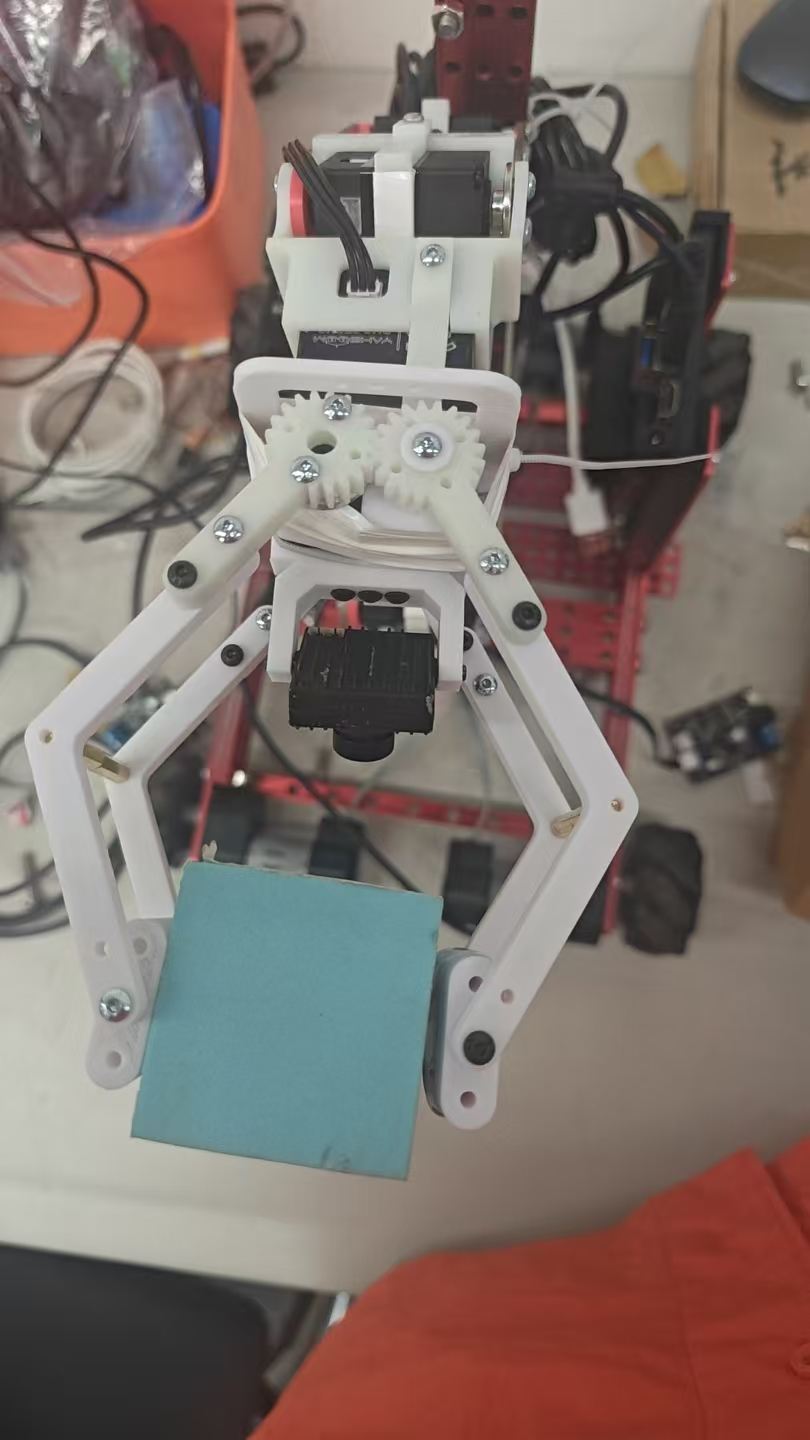
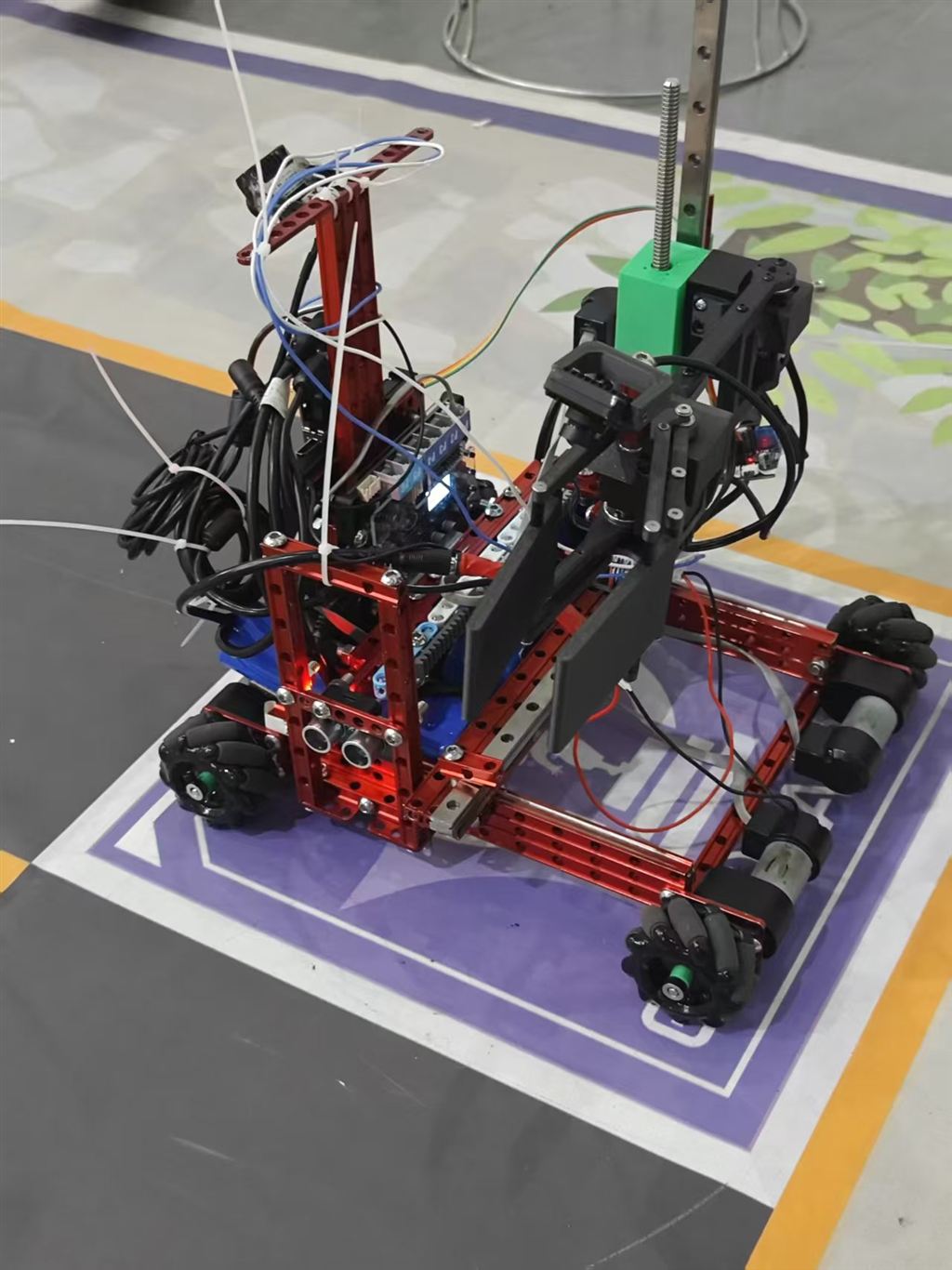
Hosted by the Automation Teaching Steering Committee of the Ministry of Education and the Chinese Association of Automation, the National University Students Intelligent Car Race is an A-level national competition that has been held for 20 editions and has accumulated more than 650,000 participants. The Baidu Smart Transportation track is a comprehensive creative track jointly organized with Baidu, requiring teams to use PaddlePaddle-based target detection, large models, embodied intelligence, and related technologies to complete scenario tasks. The 20th competition involved 602 universities and 3,287 teams, following a campus-regional-national final structure. Regional second prize is awarded to approximately the top 40% within the regional contest and indicates eligibility for national-final recommendation. Our vehicle used an omnidirectional mecanum-wheel chassis and two visual models deployed on Jetson Orin for cruising and object recognition. The robotic arm used a lead screw for Z-axis adjustment, three servos for 3-DOF manipulation, and a suction cup as the end effector, with a material-localization camera mounted at the end. I served as a core team member, responsible for mechanical structure design, modeling, fabrication, related electronic-control work, evaluation documentation for vision-model training results, and daily vehicle maintenance.
赛事由教育部自动化教指委与中国自动化学会主办,属国家A类竞赛,已举办二十届,累计超65万人次参与。百度智慧交通赛项为综合创意赛组别,由中国自动化学会主办、百度联合承办,要求基于飞桨平台,运用目标检测、大模型、具身智能等技术完成场景任务。第二十届大赛共有602所高校、3287支队伍参赛,采用校赛、区域赛、全国总决赛三级赛制。区域赛二等奖约对应同赛区前40%的水平,并具备推荐晋级全国总决赛资格。参赛小车采用全向麦轮底盘,训练两套视觉模型分别用于巡航和物体识别,均部署在Jetson Orin上。机械臂部分使用丝杆进行Z轴高度调节,使用三个舵机构成三自由度机械臂,末端采用吸盘作为执行器,物料夹取定位相机也位于执行器末端。我作为团队核心成员,负责机械结构设计、建模、制造及相关电控工作,负责评估视觉模型训练结果并撰写相关文档,同时负责小车日常维护。


14th Shanghai College Student Mechanical Engineering Innovation Competition - Municipal First Prize
第十四届上海市大学生机械工程创新大赛 市级一等奖
2025.05


Show details ▼
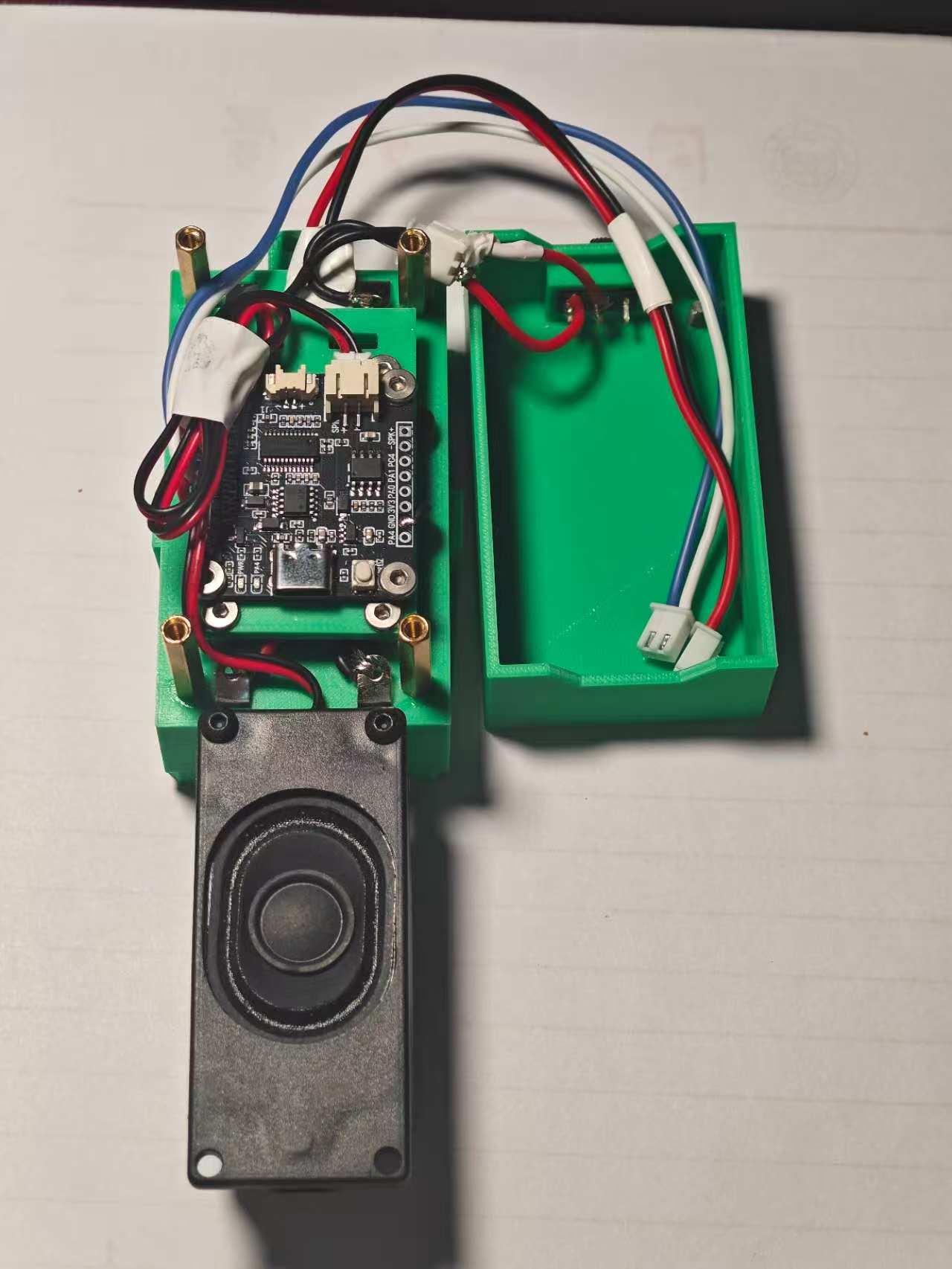
Hosted by the Shanghai Municipal Education Commission and organized by the University of Shanghai for Science and Technology, the Shanghai College Student Mechanical Engineering Innovation Competition is a city-level key discipline competition covering major engineering universities in Shanghai. The 14th competition in 2025 focused on the theme of “healthy and happy life” and attracted 146 works from 17 universities, with 30 municipal first prizes awarded. The competition also serves as a Shanghai selection platform for the National College Student Mechanical Innovation Design Competition in national-competition years. Our work targeted elderly-assistive products and proposed a voice-controlled intelligent cane chair that can transform from a walking cane into a chair when needed, supporting elderly users with reduced mobility or stamina during outdoor activities. The product uses a cam-slot and spatial linkage mechanism for folding and unfolding. The electronic system receives voice-control commands through a development board, drives a motor driver, and uses a lead-screw mechanism to actuate the structural transformation. I served as the project lead and was responsible for the complete product design, modeling, fabrication, electronic control, and testing, as well as on-site presentation and defense.
大赛由上海市教育委员会主办、上海理工大学承办,自2012年创办以来已连续举办十四届,是覆盖全市主要工科高校的市级重点学科竞赛。第十四届(2025年)以“健康幸福生活”为主题,吸引17所高校146项作品参赛,共评选出一等奖30项。该赛事在国赛年承担全国大学生机械创新设计大赛上海赛区选拔功能,市级一等奖由上海市教委颁发,在上海高校综测评优和奖学金评审中具有较高认可度。团队参赛作品面向助老产品方向,设计了一款声控智能拐杖椅,用户可在需要时控制拐杖展开为椅子,帮助腿脚不便、精力下降的老年人出行。产品通过凸轮滑槽和空间连杆机构实现展开与收起,电控装置通过开发板接收声控信息,驱动电机驱动板,并由电机带动丝杆完成机构变形。我作为项目负责人,独立负责产品的全部设计、建模、加工、电控及测试,并在竞赛现场负责讲解和答辩。






15th Shanghai College Student Mechanical Engineering Innovation Competition & 12th National College Student Mechanical Design Innovation Competition Shanghai Regional - Municipal First Prize & National Final Recommendation
第十五届上海市大学生机械工程创新大赛暨第十二届全国大学生机械设计创新大赛上海赛 省一等奖 + 推荐国赛名额(保底国二)
2026.05
Racing / 进行中


Show details ▼
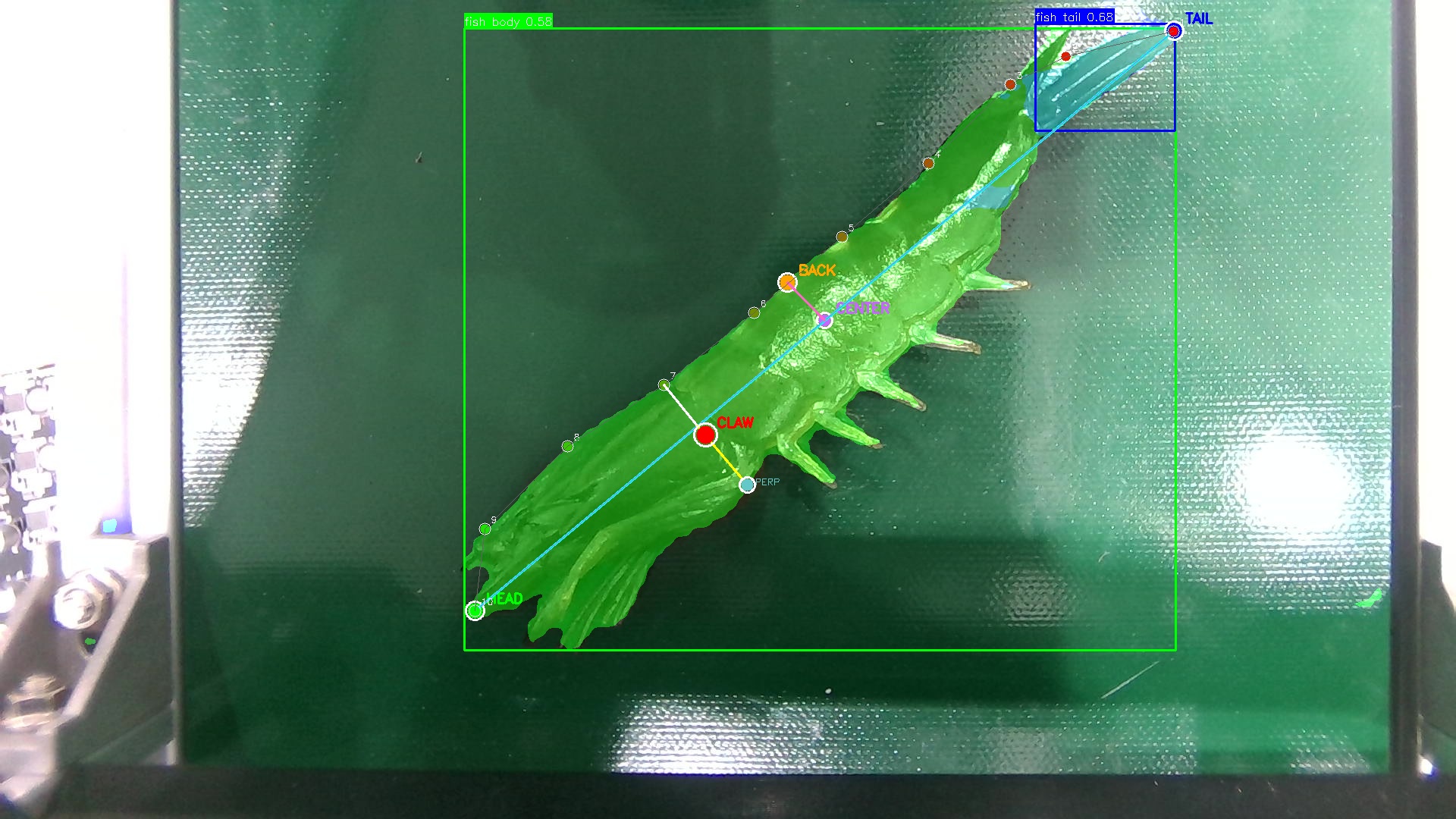
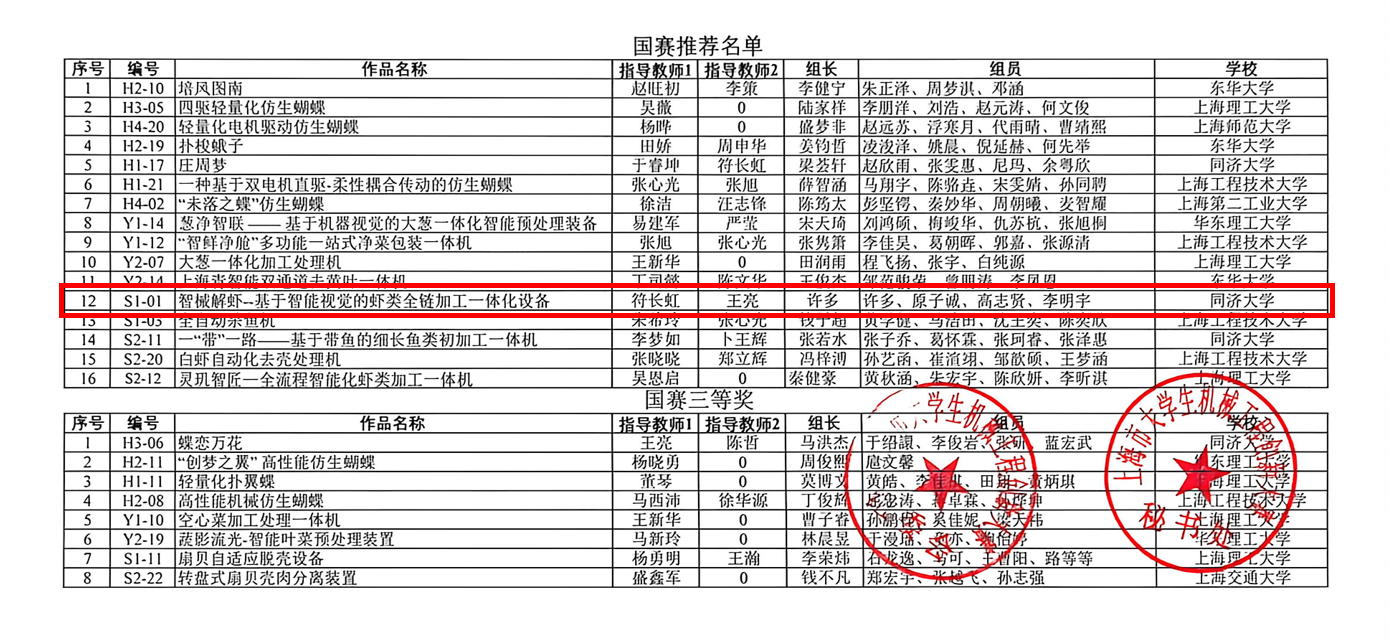
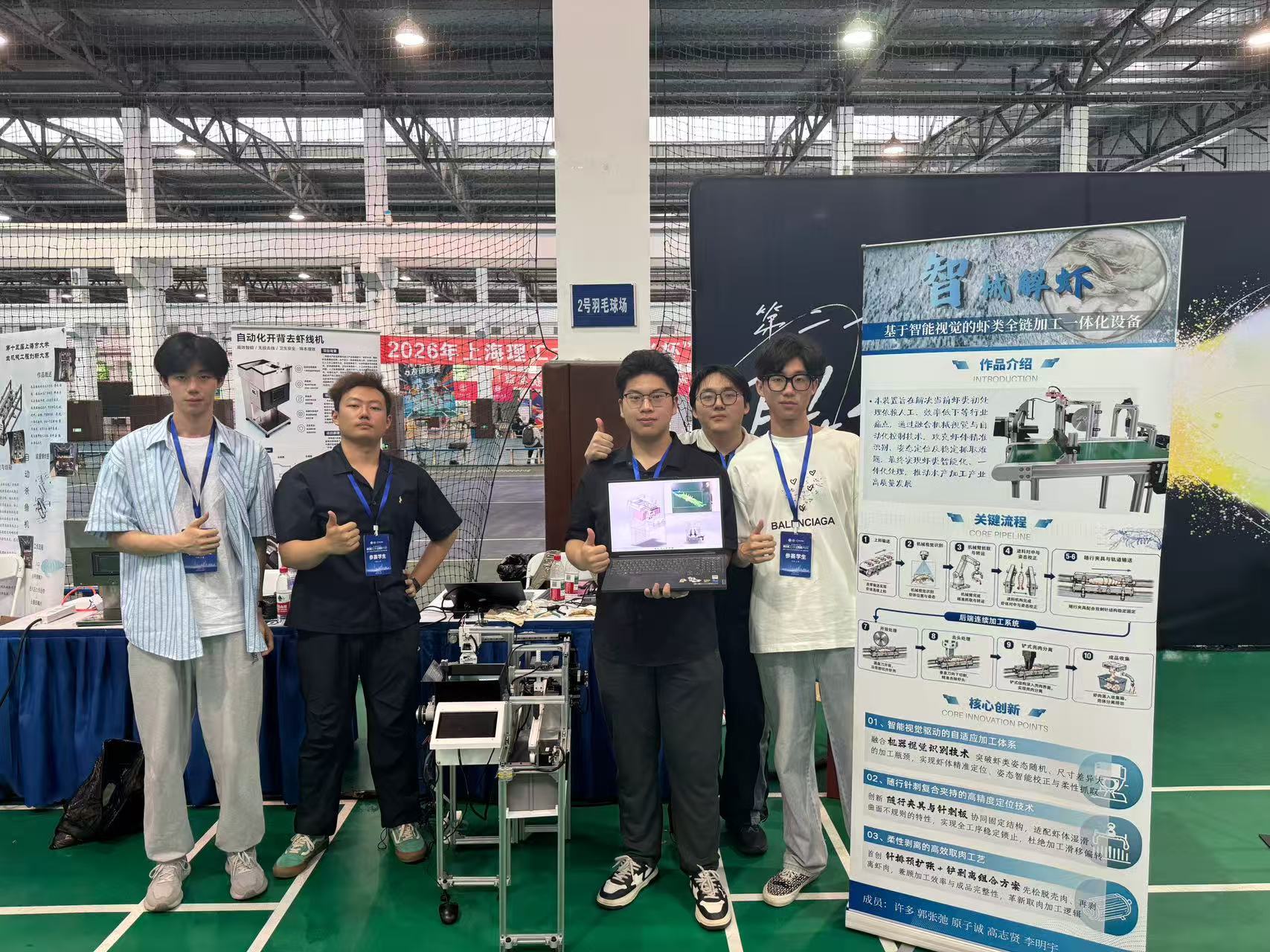
Co-hosted as the Shanghai regional selection for the 12th National College Student Mechanical Design Innovation Competition, the 15th Shanghai College Student Mechanical Engineering Innovation Competition was held at the University of Shanghai for Science and Technology on May 15–16, 2026. The 2026 theme was “Dexterity · Intelligence, Better Life.” Municipal first-prize teams are recommended to advance to the national final; according to the Shanghai selection policy, recommended teams are typically positioned for strong national-level outcomes (commonly at least a national second prize). Our team entered the aquatic-product primary-processing track with Smart Shrimp Peeling (智械解虾), an integrated machine-vision-driven shrimp pre-processing platform that chains feeding, vision-based recognition and grasping, infeed alignment, traveling-fixture fixation with dual needle pins, back splitting, head removal, shell-meat separation, brush-based meat recovery, and collection into a continuous multi-station workflow. The design addresses the core difficulty of processing irregular, slippery, and deformable shrimp bodies by combining front-end vision localization with mid-stage traveling-fixture stabilization and rear-end flexible shell-meat separation (adjustable needle expansion, shovel-type separators, and rotary brushes). I served as a core team member, contributing to part of the mechanical structure design while leading most of the electronic control algorithms and vision-system tuning and debugging, including coordinated stepper-motor indexing, multi-station action sequencing, and vision-guided grasping calibration. The work was awarded a Shanghai regional first prize with a national-final recommendation slot.
本赛事与第十二届全国大学生机械设计创新大赛上海赛区选拔合并举办,于2026年5月15–16日在上海理工大学举行,本届主题为“灵巧·智能,美好生活”。我所在团队选择特定水产品初加工机械方向,作品为“智械解虾——基于智能视觉的虾类全链加工一体化设备”:将上料输送、视觉识别与抓取、进料定位、随行夹具与双刺针固定、开背去头、壳肉分离、滚刷取肉及成品收集整合为连续多工位自动化流程,针对虾体弯曲、湿滑、规格差异和姿态不确定等非规则物料特点,以“视觉识别—进料对中—随行固定—分步加工—柔性取肉”为主线,重点强化随行夹具配合双刺针的侧向稳定约束,并结合可调针排、铲形分离件与滚刷机构降低壳肉分离阻力、提高取肉完整性。我作为团队核心成员,负责部分机械结构设计,并主导大部分电控算法以及视觉系统调试工作,包括主轨道步进节拍控制、多工位动作协调、视觉识别与抓取标定等。作品获上海赛区省一等奖并获推荐国赛名额(保底国赛二等奖水平)。



9th National University Student Innovation Experience Competition - Track 3 (Entrepreneurship Plan) - National First Prize
第九届全国大学生创新体验竞赛 赛道三(创业计划)全国一等奖
2026.05

Show details ▼
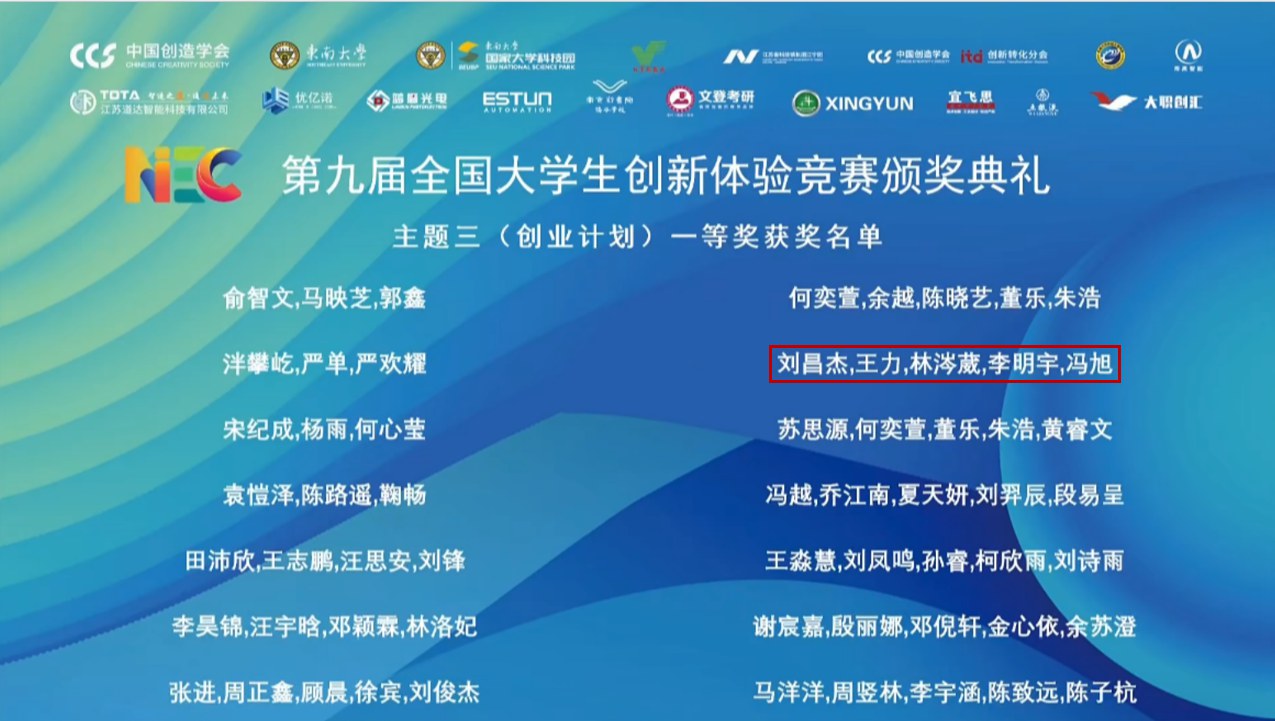
In Track 3 of the 9th National University Student Innovation Experience Competition, our team submitted SymbioCore (智汇共生), a concept-level entrepreneurship plan for a full-scenario active human–machine symbiotic service system driven by multimodal intent perception. The submission was intentionally oriented toward brainstorming and system-level framing rather than detailed engineering implementation: we focused on articulating the problem landscape, service architecture, and commercial narrative expected in the entrepreneurship track, without building a physical prototype or locking in low-level technical specifications. The concept responds to the gap between today’s embodied-intelligence hardware boom and still-limited intent understanding in complex industrial and care settings. SymbioCore proposes a three-layer framework—perceptual input (vision, force/tactile sensing, BCI, and rPPG vital-sign cues), context understanding (cloud–edge collaborative reasoning with long-horizon planning on the cloud and millisecond-level motion/fatigue assessment on the edge), and adaptive output (trajectory planning, safety intervention, compliant force compensation, and affective voice support)—so that collaboration can shift from command-following toward anticipatory “tacit understanding.” Two illustrative scenarios anchor the plan: MR-guided human–robot co-disassembly of retired batteries in high-risk manufacturing, and EEG/rPPG-assisted gait rehabilitation with fatigue-aware adjustment. The work also outlines a multi-dimensional intent-synchronization interaction paradigm and a visual–language intuitive guidance stack integrated with mixed reality. The project received a national first prize in Track 3.
在第九届全国大学生创新体验竞赛赛道三(创业计划)中,我们团队提交了 SymbioCore(智汇共生)——一套基于多模态意图感知的全场景主动式人机共生服务体系创业方案。该作品以概念框架与头脑风暴为主:侧重问题定义、体系架构与商业叙事等赛道三所要求的创造性表达,并未展开具体工程细节落地,也未制作实体样机。方案针对具身智能快速普及背景下,复杂工业与康养场景中机器人“读不懂人”的交互与安全痛点,提出“感知输入—语境理解—自适应输出”三层架构:感知层融合视觉语义、力触觉、脑机接口(BCI)与 rPPG 面部生理特征;理解层采用云边协同的“大脑+小脑”推理,云端负责长时序规划,边缘端负责毫秒级运动解算与疲劳评估;输出层实现轨迹规划、安全干预、柔性力补偿与情感化语音陪伴,使协作从“听令执行”转向“默契预判”。方案以两类典型场景论证可行性:工业端以混合现实(MR)统筹人机协同的退役电池拆解,医疗端以 EEG/rPPG 辅助脑卒中患者步态康复并按疲劳度自适应调节。交互范式上提出“多维意图同步”机制,并将视觉—语言直觉引导与 MR 结合。作品获赛道三全国一等奖。
16th Shanghai Graphics Cup Advanced Graphics Technology and Innovative Design Competition - 3D Modeling Individual Municipal First Prize & Team Municipal First Prize
第十六届"上图杯"先进成图技术与创新设计大赛 三维组个人市级一等奖、团体市级一等奖
2026.06
Show details ▼
Description of the competition goes here.
此处填写竞赛介绍内容。
15th Shanghai Graphics Cup Advanced Graphics Technology and Innovative Design Competition - 3D Modeling Individual Municipal Second Prize & Team Municipal Second Prize
第十五届"上图杯"先进成图技术与创新设计大赛 三维组个人市级二等奖、团体市级二等奖
2025.06
Show details ▼
Description of the competition goes here.
此处填写竞赛介绍内容。
1st "Insight WE Future - AI Please Answer" Startup Experience Competition - University Second Prize
第一届"洞见WE来—AI请回答"初创体验大赛 校级二等奖
2023.12

Show details ▼
Description of the competition goes here.
此处填写竞赛介绍内容。
China International College Students' Innovation Competition (2025) - Industry Track - University Silver Award
中国国际大学生创新大赛(2025)产业赛道 校级银奖
2025.07
Show details ▼
Description of the competition goes here.
此处填写竞赛介绍内容。