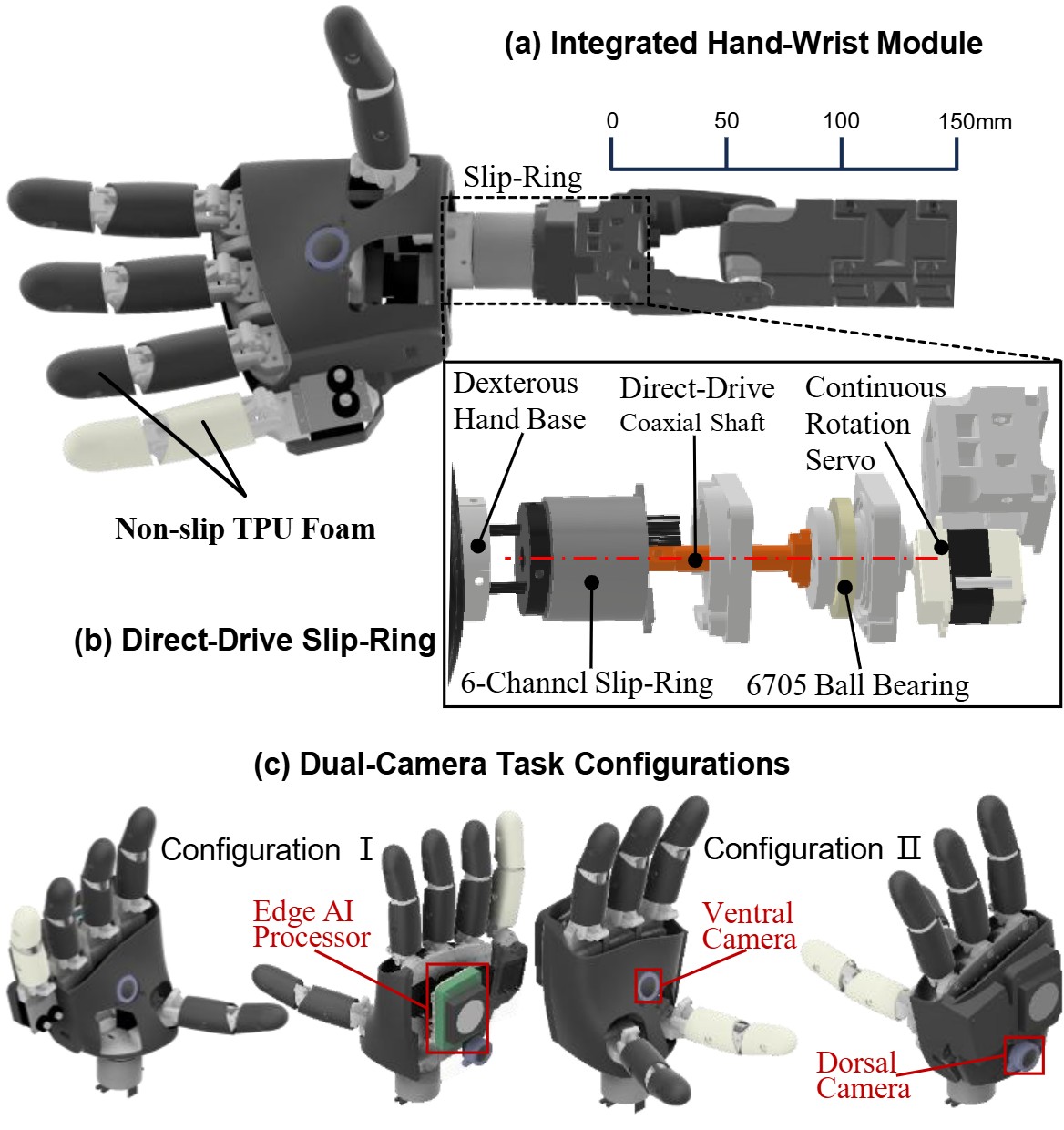
Conventional robotic grasping in semi-structured service and workstation environments is often constrained by two physical bottlenecks: visual blind spots in rearward coverage and the bounded rotational range of traditional wrists. This paper presents an edge-native hand-wrist platform that addresses these coupled limitations through electromechanical co-design. We integrate a dorsal-ventral dual-camera relay for complementary front-rear perception with a direct-drive slip-ring mechanism enabling infinite continuous wrist roll. To support real-time operation on resource-constrained edge processors, the system features a reparameterized zero-shot detector that supports language-guided grasping while removing online text-encoding overhead via offline feature reparameterization. Kinematic and spatial validations in a predefined workstation-style setup indicate that the integrated platform can execute task-prior-driven grasp acquisitions for both forward and rearward targets entirely on the edge, without additional task-specific fine-tuning or cloud offloading.
@inproceedings{li2026icarm,title={Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native Grasping},author={Li, Mingyu and Gao, Zhixian and Guo, Zhangchi},booktitle={Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics (ICARM)},location={Paris, France},year={2026},note={Accepted. Mingyu Li is the first author and corresponding author.},keywords={Robotic grasping, Dexterous hand, Edge AI, Embedded vision, Hardware-software co-design, Zero-shot detection},}
 Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native GraspingIn Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Paris, France, Tongji University , 2026Accepted. Mingyu Li is the first author and corresponding author.
Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native GraspingIn Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Paris, France, Tongji University , 2026Accepted. Mingyu Li is the first author and corresponding author.