Li Mingyu 李明宇
Junior Undergraduate, Tongji University, School of Mechanical Engineering

School of Mechanical Engineering
Tongji University
Shanghai, China
I am a junior undergraduate student at Tongji University, majoring in Mechanical Engineering. My research interests lie at the intersection of embodied intelligence, embedded systems, and computer vision, with a specific focus on low-cost dexterous intelligent grasping systems.
I am deeply passionate about building intelligent robotic platforms. Currently, I lead a research project on zero-shot visual grasping for dexterous hands in the Vision4Robotics (V4R) Lab under the supervision of Prof. Changhong Fu, while also contributing to the embedded control and intelligent manufacturing simulation of robotic arms. My research efforts include a first-author and corresponding-author paper accepted by IEEE ICARM 2026, as well as a CNIPA-accepted utility model patent application.
I am currently seeking master’s and direct Ph.D. opportunities where I can continue working on hardware-software co-design for practical robotic manipulation.
Academically, I maintain a GPA of 4.28/5.0, earning me the First-Class Scholarship and the Outstanding Student Award in 2025. Beyond the lab and classroom, I have actively participated in national-level engineering competitions, winning multiple awards that reflect my strong foundation in engineering practice and teamwork.
Volunteer Service
Beyond research and competitions, I volunteered with Sanguo’s Rural Online English Education Service (Oct–Dec 2023), providing weekly remote English instruction and companionship to left-behind children in the mountainous regions of Yunnan and Guizhou. Over 10 weeks, I taught one hour per week to students at Shangri-La Senior High School in Diqing Tibetan Autonomous Prefecture, adapting lessons to rural learners’ needs while offering consistent emotional support across distance. The experience strengthened my patience, empathy, and communication skills outside the engineering classroom.
Research Experience
Vision4Robotics (V4R) Lab, Tongji University · 2025 – Present
Core member. Working on dexterous robotic manipulation and edge-native perception systems, with contributions to a dual-vision infinite-roll dexterous hand (IEEE ICARM 2026, accepted) and a cross-domain edge-AI snake robot (CIIF Shanghai).
Intelligent Vehicle Lab, Tongji University · 2024 – 2026
Core member. Developed a precision robotic arm grasping system under 2D-camera and embedded-system constraints, and competed in the National Intelligent Vehicle Competition, winning the 2nd Prize.





news
| May 16, 2026 | Won Shanghai Regional First Prize and National Final Qualification in 15th Shanghai College Student Mechanical Engineering Innovation Competition & 12th National College Student Mechanical Design Innovation Competition Shanghai Regional (Smart Shrimp Peeling / 智械解虾) |
|---|---|
| Apr 03, 2026 | Submitted a first-author and corresponding-author paper to IEEE ICARM 2026: “Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native Grasping.” |
| Aug 23, 2025 | Won National Third Prize in BMHRI Cup Logistics Technology Creativity Contest |
| Jul 23, 2025 | Won Regional Second Prize in 20th National University Students Intelligent Car Race - Baidu Smart Transportation Track |
| Jul 07, 2025 | Won National First Prize in Higher Education Cup National College Student Advanced Graphics Technology and Product Information Modeling Innovation Competition - Additive Manufacturing Track |
| Jun 10, 2025 | Utility model patent application “Folding Cane Chair” accepted by the China National Intellectual Property Administration. Application No. 202521174680.9. |
| May 16, 2025 | Won Municipal First Prize in 14th Shanghai College Student Mechanical Engineering Innovation Competition |
selected publications
- ICARM
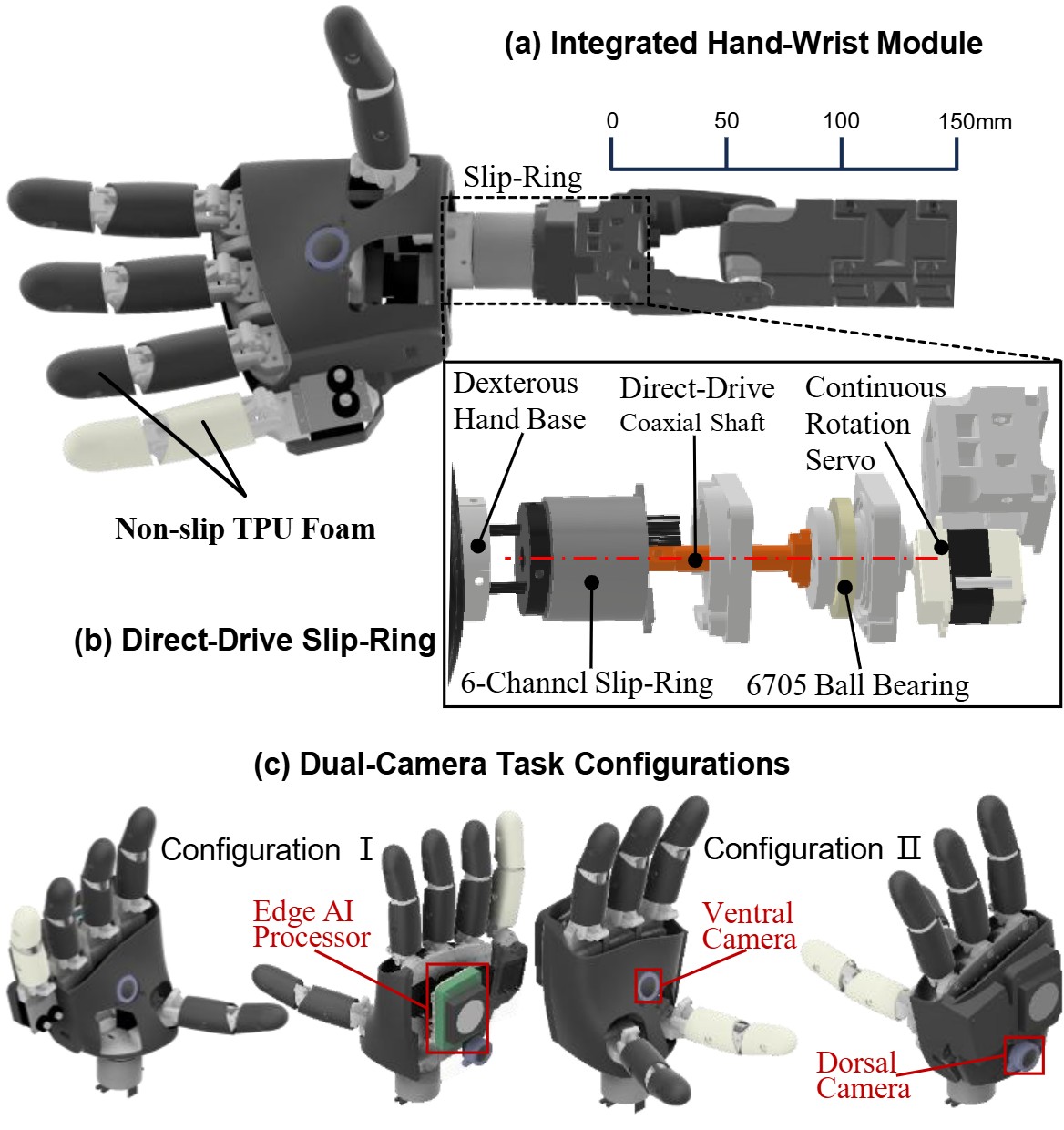 Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native GraspingIn Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Paris, France, Tongji University , 2026Accepted. Mingyu Li is the first author and corresponding author.
Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native GraspingIn Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Paris, France, Tongji University , 2026Accepted. Mingyu Li is the first author and corresponding author.