Li Mingyu 李明宇
本科大三, 同济大学, 机械工程与机器人学院

机械工程与机器人学院
同济大学
中国上海
我是同济大学机械工程与机器人学院的一名大三本科生,研究方向为机械电子与机器视觉,聚焦机器人抓取与嵌入式视觉系统。
本人GPA 4.28/5.0,CET-6 510分,核心专业课成绩优异。曾获同济大学校奖学金一等奖及校级优秀学生荣誉(2025年)。具备扎实的机械、编程与算法基础,主攻智能机器人、机器视觉交叉方向。
科研上,我聚焦机器人抓取与嵌入式视觉,主持灵巧手零样本视觉抓取项目,参与机械臂嵌入式控制、智能制造仿真课题;以一作兼通讯作者 IEEE ICARM 2026 会议论文已录用,并有一项实用新型专利申请获国家知识产权局受理。
在校期间深耕课题组前沿研讨,获多项国家级竞赛奖项,工程实践与协作能力扎实。
志愿活动
除科研与竞赛外,我于 2023 年 10–12 月参与三果「中国农村线上英语教育服务」远程支教项目,面向云贵山区留守儿童开展每周 1 小时、共 10 周的线上英语教学与陪伴志愿活动,服务地点为云南省迪庆藏族自治州香格里拉中学。活动中我根据乡村学生学情调整授课方式,在跨地域远程协作中锻炼耐心、沟通与换位思考能力。





动态
| May 16, 2026 | Won Shanghai Regional First Prize and National Final Qualification in 15th Shanghai College Student Mechanical Engineering Innovation Competition & 12th National College Student Mechanical Design Innovation Competition Shanghai Regional (Smart Shrimp Peeling / 智械解虾) |
|---|---|
| Apr 03, 2026 | Submitted a first-author and corresponding-author paper to IEEE ICARM 2026: “Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native Grasping.” |
| Aug 23, 2025 | Won National Third Prize in BMHRI Cup Logistics Technology Creativity Contest |
| Jul 23, 2025 | Won Regional Second Prize in 20th National University Students Intelligent Car Race - Baidu Smart Transportation Track |
| Jul 07, 2025 | Won National First Prize in Higher Education Cup National College Student Advanced Graphics Technology and Product Information Modeling Innovation Competition - Additive Manufacturing Track |
| Jun 10, 2025 | Utility model patent application “Folding Cane Chair” accepted by the China National Intellectual Property Administration. Application No. 202521174680.9. |
| May 16, 2025 | Won Municipal First Prize in 14th Shanghai College Student Mechanical Engineering Innovation Competition |
代表论文
- ICARM
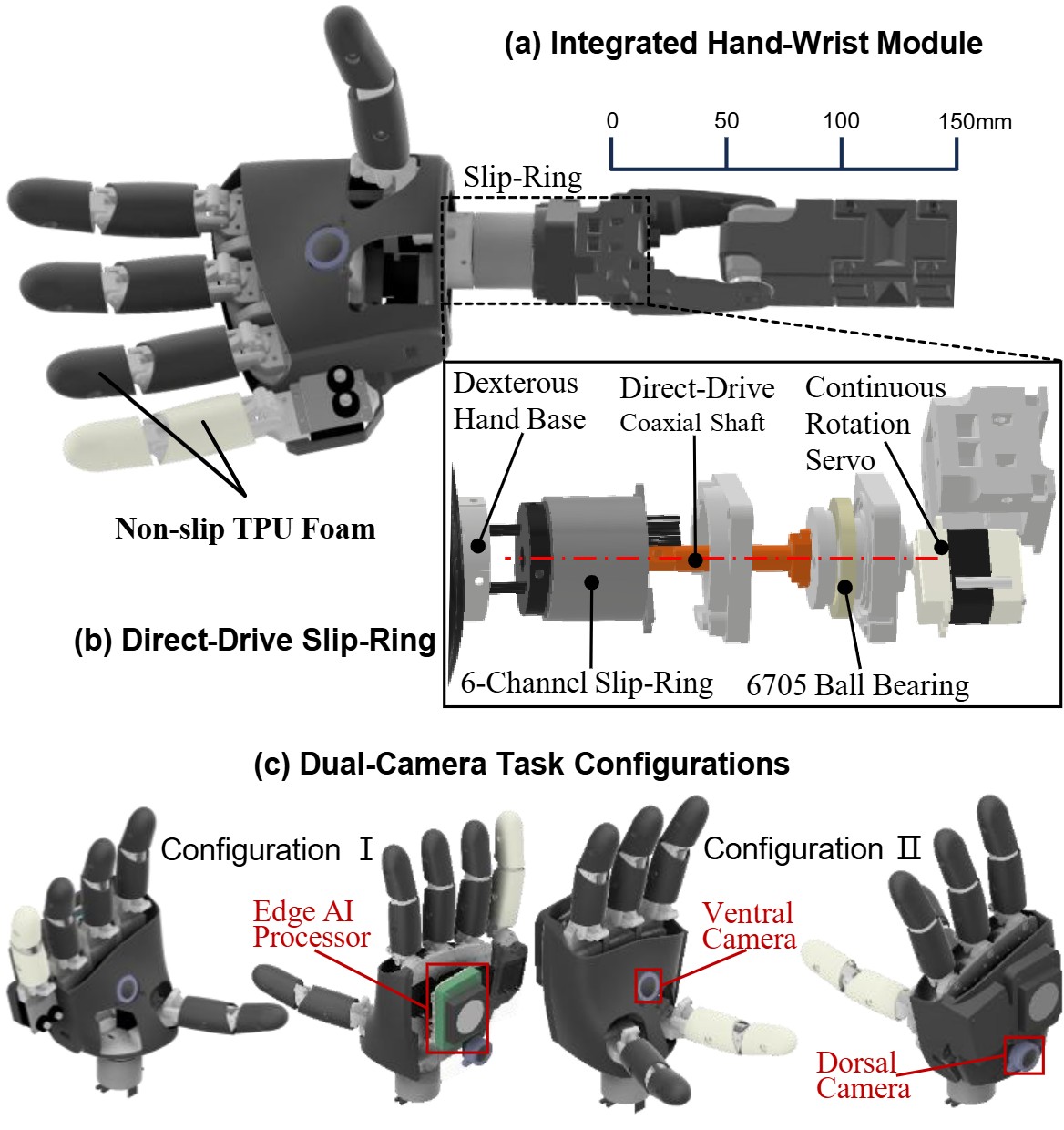 Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native GraspingIn Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Paris, France, Tongji University , 2026Accepted. Mingyu Li is the first author and corresponding author.
Hardware-Software Co-Design of a Dual-Vision, Infinite-Roll Hand for Edge-Native GraspingIn Proceedings of the IEEE International Conference on Advanced Robotics and Mechatronics (ICARM), Paris, France, Tongji University , 2026Accepted. Mingyu Li is the first author and corresponding author.